El escaneo láser LIDAR o 3D se desarrolló a principios de la década de 1960 para la detección submarina desde un avión, y los primeros modelos se utilizaron con éxito a principios de la década de 1970. Hoy en día, la investigación medioambiental es difícil de imaginar sin el uso de técnicas de teledetección como la detección de luz y rango (LIDAR) y Detección y rango de ondas de radio (RADAR) . La alta resolución espacial y progresiva de las mediciones, la posibilidad de observar la atmósfera en condiciones ambientales, y el potencial de cubrir el rango de altura desde el suelo hasta más de 100 km de altitud componen el atractivo de los instrumentos LIDAR.
La variedad de procesos de interacción de la radiación emitida con los elementos atmosféricos se puede utilizar en el LIDAR para permitir la determinación de las variables ambientales básicas de estado, es decir, temperatura, presión, humedad y viento, así como el levantamiento geográfico, río elevación del lecho, estudio de las minas, densidad de bosques y cerros, estudio del fondo del mar (Batimetría).
¿Cómo funciona LIDAR?
El principio de funcionamiento del sistema de detección y rango de luz es realmente bastante simple. Un sensor LIDAR montado en un avión o helicóptero. Genera un tren de pulsos láser, que se envía a la superficie / objetivo para medir el tiempo y tarda en volver a su origen. El cálculo real para medir qué tan lejos ha viajado un fotón de luz que regresa hacia y desde un objeto se calcula mediante
Distancia = (Velocidad de la luz x Tiempo de vuelo) / 2
Luego se calculan distancias precisas a los puntos en el suelo y se pueden determinar las elevaciones junto con la superficie del suelo, se pueden registrar los edificios, las carreteras y la vegetación. Estas elevaciones se combinan con fotografía aérea digital para producir un modelo de elevación digital de la tierra.

Sistema de detección y rango de luz
El instrumento láser dispara pulsos rápidos de luz láser en una superficie, algunos hasta 150.000 pulsos por segundo. Un sensor en el instrumento mide la cantidad de tiempo que tarda cada pulso en reflejarse. La luz se mueve a una velocidad constante y conocida, por lo que el instrumento LIDAR puede calcular la distancia entre él y el objetivo con alta precisión. Al repetir esto en progresión rápida, el instrumento construye un 'mapa' complejo de la superficie que está midiendo.
Con Detección y alcance de luz aerotransportada , se deben recopilar otros datos para garantizar la precisión. Como el sensor se mueve en altura, se debe incluir la ubicación y la orientación del instrumento para determinar la posición del pulso láser en el momento del envío y el momento del retorno. Esta información adicional es crucial para la integridad de los datos. Con Detección y rango de luz basados en tierra se puede agregar una única ubicación GPS en cada ubicación donde se instala el instrumento.
Tipos de sistemas LIDAR
Basado en la plataforma
- LIDAR terrestre
- LIDAR aerotransportado
- LIDAR espacial

Sistemas LiDAR basados en plataforma
Bade en proceso físico
- Telémetro LIDAR
- DIAL LIDAR
- Doppler LIDAR
Bade sobre el proceso de dispersión
- Mi
- Rayleigh
- Raman
- Fluorescencia
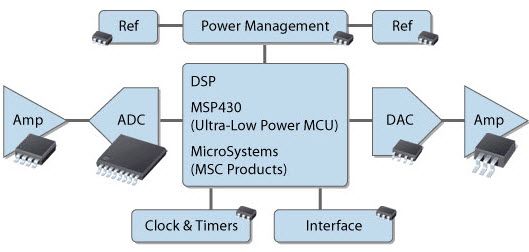
Componentes principales de los sistemas LIDAR
La mayoría de los sistemas de detección de luz y rango utilizan cuatro componentes principales

Componentes de sistemas de detección de luz y alcance
Láseres
Los láseres se clasifican por su longitud de onda. Los sistemas de detección y rango de luz en el aire utilizan láseres Nd: YAG bombeados por diodos de 1064 nm, mientras que los sistemas batimétricos utilizan láseres Nd: YAG bombeados por diodos dobles de 532 nm que penetran en el agua con menos atenuación que el sistema aéreo (1064 nm). Se puede lograr una mejor resolución con pulsos más cortos siempre que el detector del receptor y la electrónica tengan suficiente ancho de banda para administrar el aumento del flujo de datos.
Escáneres y ópticas
La velocidad a la que se pueden revelar las imágenes se ve afectada por la velocidad a la que se pueden escanear en el sistema. Se encuentra disponible una variedad de métodos de escaneo para diferentes resoluciones como azimut y elevación, escáner de doble eje, espejos de plano oscilante dual y espejos poligonales. El tipo de óptica determina el alcance y la resolución que puede detectar un sistema.
Electrónica del fotodetector y del receptor
El fotodetector es un dispositivo que lee y registra la señal de retrodispersión al sistema. Hay dos tipos principales de tecnologías de fotodetectores, detectores de estado sólido, como fotodiodos de avalancha de silicio y fotomultiplicadores.
Sistemas de navegación y posicionamiento / GPS
Cuando se monta un sensor de detección de luz y distancia en un satélite de avión o en automóviles, es necesario determinar la posición absoluta y la orientación del sensor para mantener los datos utilizables. Sistemas de posicionamiento global (GPS) proporcionan información geográfica precisa sobre la posición del sensor y una unidad de medición inercial (IMU) registra la orientación precisa del sensor en esa ubicación. Estos dos dispositivos proporcionan el método para traducir los datos del sensor en puntos estáticos para su uso en una variedad de sistemas.

Sistemas de navegación y posicionamiento / GPS
Procesamiento de datos LIDAR
El mecanismo de detección de luz y rango solo recopila datos de elevación y, junto con los datos de la unidad de medición inercial, se coloca con la aeronave y una unidad de GPS. Con la ayuda de estos sistemas, el sensor de detección y rango de luz recopila puntos de datos, la ubicación de los datos se registra junto con el sensor GPS. Se requieren datos para procesar el tiempo de retorno de cada pulso dispersado de regreso al sensor y calcular las distancias variables desde el sensor o los cambios en las superficies de cobertura terrestre. Después de la encuesta, los datos se descargan y procesan utilizando un software de computadora especialmente diseñado (software de procesamiento de datos en la nube LIDAR point). El resultado final es la longitud (X), la latitud (Y) y la elevación (Z) registradas geográficamente y precisas para cada punto de datos. Los datos cartográficos LIDAR se componen de mediciones de elevación de la superficie y se obtienen mediante levantamientos topográficos aéreos. El formato de archivo utilizado para capturar y almacenar datos LIDAR es un archivo de texto simple. Mediante el uso de puntos de elevación, los datos se pueden utilizar para crear mapas topográficos detallados. Con estos puntos de datos incluso también permiten la generación de un modelo de elevación digital de la superficie del suelo.
Aplicaciones de los sistemas LIDAR
Oceanografía
El LIDAR se utiliza para calcular la fluorescencia y la biomasa del fitoplancton en la superficie del océano. También se utiliza para medir la profundidad del océano (batimetría).

LiDAR en Oceanografía
DEM (modelo de elevación digital)
Tiene coordenadas x, y, z. Los valores de elevación se pueden utilizar en todas partes, en carreteras, edificios, puentes y otros. Ha facilitado la captura de la altura, longitud y anchura de la superficie.
Física atmosférica
LIDAR se utiliza para medir la densidad de las nubes y la concentración de oxígeno, Co2, nitrógeno, azufre y otras partículas de gas en la atmósfera media y alta.
Militar
LIDAR siempre ha sido utilizado por los militares para comprender la frontera que rodea la tierra. Crea un mapa de alta resolución para fines militares.
Meteorología
LIDAR se ha utilizado para el estudio de la nube y su comportamiento. LIDAR usa su longitud de onda para golpear pequeñas partículas en la nube para comprender la densidad de la nube.
River Survey
Greenlight (532 nm) Lasar del LIDAR se utiliza para medir la información submarina que se requiere para comprender la profundidad, el ancho del río, la fuerza del flujo y más. Para la ingeniería del río, sus datos de sección transversal se extraen de los datos de detección y rango de luz (DEM) para crear un modelo de río, que creará un mapa de franjas de inundación.

Levantamiento del río usando LIDAR
Micro-Topografía
La detección y rango de luz es una tecnología muy precisa y clara, que utiliza pulsos de láser para golpear el objeto. La fotogrametría regular u otra tecnología de levantamiento no puede dar el valor de elevación de la superficie del dosel del bosque. Pero el LIDAR puede penetrar a través del objeto y detectar el valor de la superficie.
¿Tiene la información básica de LIDAR y sus aplicaciones? Reconocemos que la información proporcionada anteriormente aclara los conceptos básicos del concepto de mecanismo de detección y rango de luz con imágenes relacionadas y varias aplicaciones en tiempo real. Además, cualquier duda sobre este concepto o para implementar algún proyecto electrónico, por favor dé sus sugerencias y comentarios sobre este artículo que puede escribir en la sección de comentarios a continuación. Aquí hay una pregunta para ti, ¿Cuáles son los diferentes tipos de detección de luz y rango?