Un tacómetro es un dispositivo que mide las RPM o la velocidad angular de un cuerpo en rotación. Se diferencia del velocímetro y el odómetro en que estos dispositivos se ocupan de la velocidad lineal o tangencial del cuerpo, mientras que el tacómetro, también conocido como 'tacómetro', se ocupa de las RPM más fundamentales.
Por Ankit Negi
El tacómetro está compuesto por un contador y un temporizador, ambos trabajando juntos proporcionan las RPM.En nuestro proyecto vamos a hacer lo mismo, usando nuestro Arduino y algunos sensores configuraremos un contador y un temporizador y desarrollaremos nuestro práctico y sencillo tacómetro. .
Prerrequisitos
El contador no es más que un dispositivo o configuración que puede contar cualquier evento que ocurra regularmente, como pasar un punto en el disco mientras está en rotación. Inicialmente, los contadores se construyeron utilizando la disposición mecánica y enlaces como engranajes, trinquetes, resortes, etc.
Pero ahora estamos usando un contador que tiene sensores y electrónica más sofisticados y altamente precisos. El temporizador es un elemento electrónico que puede medir el intervalo de tiempo entre eventos o medir el tiempo.
En nuestro Arduino Uno hay temporizadores que no solo llevan la cuenta del tiempo sino que también mantienen algunas de las funciones importantes de Arduino. En Uno tenemos 3 temporizadores llamados Timer0, Timer1 y Timer2. Estos temporizadores tienen las siguientes funciones: • Timer0- Para funciones de Uno como delay (), millis (), micros () o delaymicros ().
• Timer1- Para el funcionamiento de la biblioteca de servos.
• Timer2- Para funciones como tono (), notone ().
Junto con estas funciones, estos 3 temporizadores también son responsables de generar la salida PWM cuando se usa el comando analogWrite () en el pin designado PMW.
Concepto de interrupciones
En Arduino Uno está presente una herramienta oculta que puede darnos acceso a una gran cantidad de funciones conocidas como Timer Interrupts. Interrupt es un conjunto de eventos o instrucciones que se ejecutan cuando se llama interrumpiendo el funcionamiento actual del dispositivo, es decir, pase lo que pase. códigos que su Uno estaba ejecutando antes, pero una vez que una interrupción se llama Arduino, ejecute la instrucción mencionada en la interrupción.


Ahora se puede llamar a Interrupt en ciertas condiciones definidas por el usuario usando una sintaxis Arduino incorporada. Usaremos esta interrupción en nuestro proyecto que hace que nuestro tacómetro sea más resuelto y más preciso que el otro proyecto de tacómetro presente en la web.
Componentes necesarios para este proyecto de tacómetro con Arduino
• Sensor de efecto Hall (Fig.1)

• Arduino Uno

• Pequeño imán

• Cables de puente
• Objeto giratorio (eje del motor)

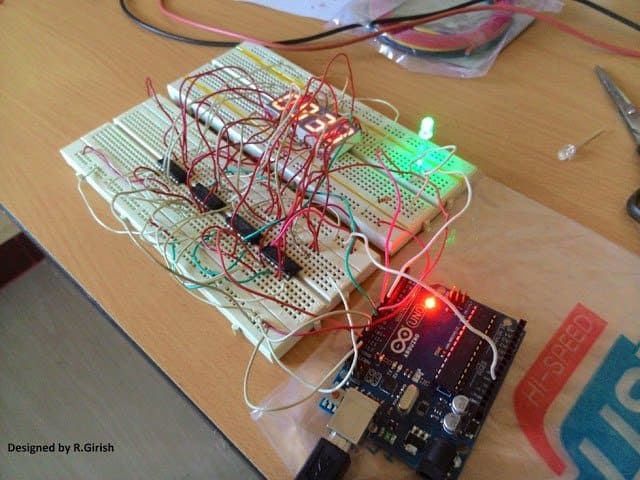
Configuración del circuito
• La configuración para crear es la siguiente:
• En el eje cuya velocidad de rotación se va a medir se coloca un pequeño imán mediante pistola de cola o cinta aislante.
• El sensor de efecto Hall tiene un detector en el frente y 3 pines para las conexiones.
• Los pines Vcc y Gnd están conectados a los pines 5V y Gnd de Arduino respectivamente. El pin de salida del sensor está conectado al pin digital 2 del Uno para proporcionar la señal de entrada.
• Todos los componentes están fijados en una placa de montaje y el detector Hall se señala desde la placa.
Programación
|_+_|
Sube el código.
Conoce el código
Nuestro tacómetro utiliza el sensor de efecto Hall El sensor de efecto Hall se basa en el efecto Hall y lleva el nombre de su descubridor Edwin Hall.
El efecto Hall es un fenómeno de generación de voltaje a través de un conductor portador de corriente cuando se introduce un campo magnético perpendicular al flujo de corriente. Este voltaje generado debido a este fenómeno ayuda en la generación de la señal de entrada.Como se mencionó Interrupt será utilizado en este proyecto, para llamar Interrupt tenemos que configurar alguna condición. Arduino Uno tiene 2 condiciones para solicitar interrupciones:
RISING - Cuando se usa esto, se llaman interrupciones cada vez que la señal de entrada pasa de BAJA a ALTA.
FALING: cuando se usa esto, se llama a interrupción cuando la señal pasa de HIGH a LOW.
Hemos usado el RISING, lo que sucede es que cuando el imán colocado en el eje o el objeto giratorio se acerca al detector Hall, se genera la señal de entrada y se llama a Interrupt, Interrupt inicia la función de Rutina de servicio de interrupción (ISR), que incluye incremento en el valor de los recuentos y por lo tanto tiene lugar el recuento.
Hemos utilizado la función millis () de Arduino y anteriorustime (variable) en correspondencia para configurar el temporizador.
Por lo tanto, las RPM se calculan finalmente utilizando la relación matemática:
RPM = Recuentos / Tiempo invertido Convirtiendo los milisegundos a minutos y reordenando obtenemos la fórmula = 60 * 1000 / (milis () - tiempo anterior) * conteos.
El retraso (1000) determina el intervalo de tiempo después del cual el valor de RPM se actualizará en la pantalla, puede ajustar este retraso según sus necesidades.
Este valor de RPM obtenido se puede utilizar además para calcular la velocidad tangencial del objeto en rotación utilizando la relación - v = (3,14 * D * N) / 60 m / s.
El valor de RPM también se puede usar para calcular la distancia recorrida por una rueda o disco giratorio.
En lugar de imprimir valores en el monitor serial, este dispositivo puede resultar más útil conectando una pantalla LCD (16 * 2) y una batería para un mejor uso.
Anterior: Circuito de controlador de motor paso a paso con IC 555 Siguiente artículo: Circuito medidor de capacitancia digital con Arduino