La publicación analiza un circuito sensor de proximidad basado en infrarrojos simple que se implementa para estudiar las aves y su comportamiento, instalando el circuito junto a nidos de pájaros hechos artificialmente. La idea fue solicitada por el Sr. Jan Simberg.
Especificaciones técnicas
Espero que tenga tiempo para leer estas pocas líneas. En primer lugar, ¡gracias por los esquemas interesantes! ¡Ellos también están funcionando! Somos tres tipos que están estudiando pájaros y tenemos alrededor de 1700 nidos de pájaros para revisar. El nido de pájaros es una pequeña caja de madera con un agujero en la parte delantera.
NO soy electricista, pero estoy tratando de encontrar una manera económica de encender un LED fuera del nido (¡solo algunas decenas!) Cuando hay un pájaro. El LED tiene que parpadear unos 5 minutos después de cada detección de movimiento.
Puedo usar una batería recargable y una celda solar de una luz de jardín, esto está bien. Encontré su 'Detector de movimiento infrarrojo preciso o Circuito detector de proximidad' en Internet y esa podría ser una solución. ¿Puedo cambiar el zumbador a un LED con una resistencia?
En segundo lugar, encontré su 'circuito indicador de batería baja que usa solo dos transistores' y que fue un éxito. ¿Cuál es el voltaje más bajo para un paquete de baterías recargables 4 veces 1,2 V = 4,8 V? ¿Alguna idea de cómo bajar el consumo actual? ¿Qué pasa con el enganche de 5 minutos?
Los detectores de corrientes inducidas y PIR podrían funcionar, pero creo que consumen demasiada corriente. Los detectores de ultrasonido están fuera de discusión: ¿qué frecuencia oye un pájaro?
Por fin, hice un diseño rápido de PCB para su detector de infrarrojos. Por favor, elimine si es demasiado horrible.
Regs,
Jan Simberg
El diseño
El circuito detector de aves propuesto en el nido se puede entender con los siguientes puntos:
El IC LM567 está configurado en su modo de detector de frecuencia de bucle de bloqueo de fase estándar.
El fotodiodo IR LD274 se alimenta con la frecuencia establecida desde el IC y este fotodiodo se convierte en el dispositivo transmisor.
Otro fotodiodo BP104 se coloca paralelo al fotodiodo anterior de manera que pueda recibir los rayos IR reflejados en presencia de un obstáculo (un pájaro aquí) dentro de la distancia especificada frente a ellos.
El BP104 se convierte en el dispositivo receptor de infrarrojos del circuito y está sintonizado para responder solo a los rayos reflejados por LD274 y no a otras invasiones espúreas.
Tan pronto como se detecta un obstáculo, el BP104 dispara y activa el IC LM567 con una lógica baja en su pin de salida 8.
Sin embargo, la lógica baja activada anteriormente estará activa solo mientras el intruso esté preestablecido en la zona de detección.
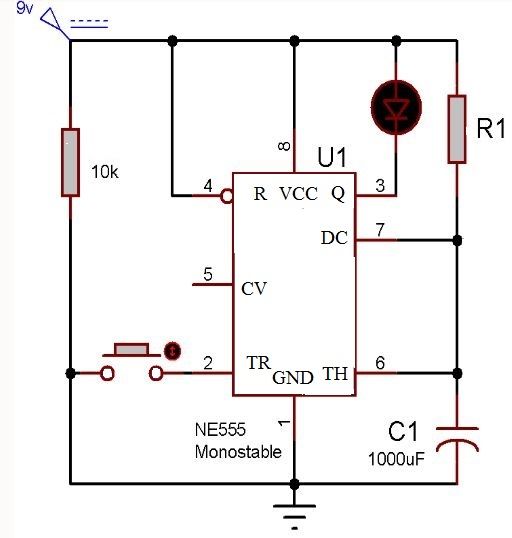
Para mantener la salida sostenida durante un período de tiempo razonable, se introduce un IC 555 monoestable junto con el IC LM567.
El IC 555 acepta la señal baja del pin 8 del LM567 y mantiene su pin 3 alto durante un período de tiempo predeterminado incluso después de que la salida del LM567 se desactive debido a una posible desaparición abrupta del obstáculo.
El período durante el cual el pin3 de IC 555 permanece encendido puede establecerse ajustando adecuadamente los valores de R9 / C5
El transistor T3 restringe e inhibe la carga de C5 hasta que el pin 8 de LM567 se desactive debido a la eliminación del obstáculo.
El paso anterior asegura que el tiempo de encendido del pestillo de salida del IC 555 se inicie solo después de que el pájaro haya entrado en el nido, esto también asegura que la salida del IC 555 ejecute el pestillo de tiempo predeterminado solo después de que el pin 8 del IC LM567 se haya vuelto inactivo.
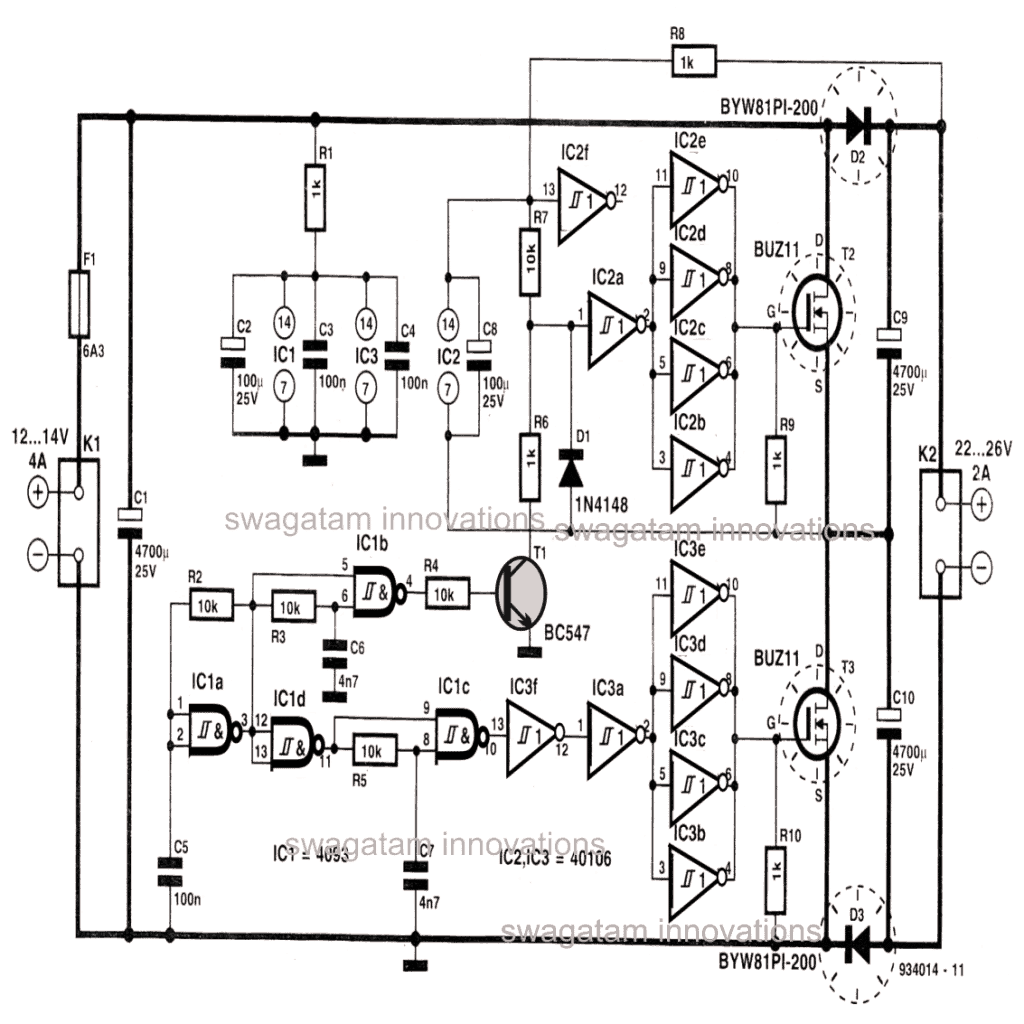
Diagrama de circuito

El diseño de PCB para el circuito anterior, enviado por Jan:

Artículo anterior: Circuito desinfectante ultravioleta (UV) para desinfectar materiales domésticos Siguiente: Cómo conectar la luz empotrada LED del coche