
Por lo general, los robots de control remoto utilizan circuitos de RF, que tienen los inconvenientes de un rango de trabajo limitado, un control limitado y un rango de frecuencia limitado. Para superar estos inconvenientes, land rover operado por teléfono celular Se utiliza vehículo robótico. Aporta las ventajas del control robótico, controladores libres de intrusiones y hasta doce sistemas de control, etc.
Aunque las capacidades y apariencia de robótica integrada varían enormemente, todos los robots comparten las características de una estructura mecánica móvil bajo alguna forma de control. El control de los robots involucra tres fases diferentes que son percepción, procesamiento y acción. Normalmente, los sensores se montan en el robot. La percepción y el procesamiento se realiza mediante el microcontrolador de a bordo, y la acción se realiza mediante motores.
Vehículo robótico Land Rover operado por teléfono celular

Vehículo robótico Land Rover operado por teléfono celular por Edgefxkits.com
La intención principal de este proyecto es controlar un brazo robótico que se monta en un vehículo robótico mediante un teléfono móvil. Proporciona un amplio rango de trabajo y un control robusto, etc.
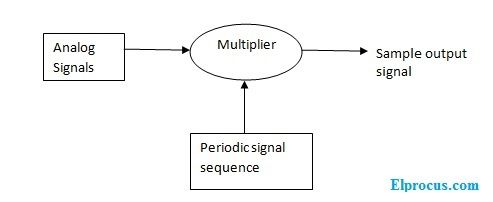
Diagrama de bloques del vehículo robótico Land Rover operado por teléfono celular:

Diagrama de bloques de Land Rover operado por teléfono celular
Los componentes principales son el microcontrolador, el teléfono móvil, el decodificador DTMF y el circuito controlador de motor de CC. El teléfono celular es la parte más importante de todo el sistema porque todo el sistema funciona y es activado por el teléfono celular. DTMF (multifrecuencia de tono dual) recibe la señal de entrada del teléfono celular y la decodifica, y luego genera una salida digital de 4 bits del Microcontrolador 8051 . Cuando el decodificador DTMF da una salida digital, también genera una interrupción cada vez.
El microcontrolador es el corazón de todo el sistema, ya que realiza todas las acciones de control. El microcontrolador depende del código que genera el decodificador DTMF para mover el móvil hacia la derecha o hacia la izquierda y hacia adelante o hacia atrás girando ambos motores de CC. El controlador del motor de CC recibe señales de activación del microcontrolador en términos de lógica alta o baja, luego amplifica y hace girar dos motores en ambas direcciones.
El control del robot implica principalmente cuatro fases diferentes: percepción, procesamiento de acciones y detección. En la etapa de percepción, si el teléfono celular conectado al robot recibe una llamada, entonces la acción de presionar la tecla en el teléfono celular decodifica el tono DTMF generado. Luego, el chip decodificador recibe la señal de audio del teléfono celular y luego convierte el tono DTMF en un código binario, que luego se envía al microcontrolador. En este proyecto, se utiliza un IC MT88710 como decodificador DTMF. En la etapa de procesamiento, el microcontrolador procesa el código binario que se recibe del decodificador DTMF. los El microcontrolador está preprogramado en 'C' para realizar esta tarea en particular de acuerdo con los bits de entrada.
En la etapa de acción, la rotación de los motores depende de la entrada dada por el microcontrolador. Se utilizan dos motores de CC de 30 RPM cada uno para el Landrover y son impulsados por el controlador de motor IC. Al detectar el escenario y para la detección de obstáculos, transmisor y receptor de infrarrojos se utilizan junto con el timbre. Cuando el obstáculo se encuentra frente al robot, el transmisor de infrarrojos transmite los rayos de infrarrojos sobre el objeto, luego el objeto refleja los rayos de infrarrojos al receptor de infrarrojos. El receptor de infrarrojos recibe los rayos infrarrojos para activar el timbre.
Diagrama de circuito del vehículo robótico Land Rover operado por teléfono celular:
Los componentes principales de este landrover robótico operado por teléfono celular son el microcontrolador, el controlador del motor y el decodificador DTMF. En este proyecto se utiliza un decodificador DTMF de la serie MT8870 que utiliza técnicas de conteo digital para detectar los 16 pares de tonos DTMF en una salida de código de 4 bits. El circuito de tono de marcación incorporado elimina el filtrado previo. Si se da una señal de entrada en el pin2, entonces se reconoce que la configuración de entrada es efectiva. La señal de decodificación de 4 bits del tono DTMF se transfiere al pin 11 a través de la salida del pin 14. Estos pines están conectados a los pines del microcontrolador Pao, Pa1, Pa2 y Pa3. La salida del microcontrolador desde los pines del puerto PD0 a PD3 y PD7 se alimenta a las entradas IN1, IN4 y permite que los pines EN1, EN2 del controlador de motor L293D IC conducir los dos motores de CC .

Diagrama de circuito de Land Rover operado por teléfono celular
En este circuito, el interruptor S1 se usa para reinicio manual. La salida del microcontrolador no es suficiente para impulsar los motores de CC, por lo que los controladores de corriente son necesarios para la rotación del motor. El controlador del motor L293D está diseñado para proporcionar corrientes de control bidireccionales de hasta 600 mA a voltajes de 4.5V a 36V, lo que lo convierte en más fácil de conducir los motores de CC. El controlador de motor L293D consta de cuatro controladores. Los pines IN1 a IN4 y OUT1 y OUT4 son los pines de entrada y salida del controlador 1 al controlador 4. Los controladores 1, 2, 3 y 4 están habilitados por el pin1 de habilitación (EN1) y el pin 9 (EN2). Cuando la entrada de habilitación EN1 (pin1) es alta, los controladores 1 y 2 están habilitados. Del mismo modo, la entrada de habilitación EN2 (pin9) habilita los controladores 3.
Ventajas y desventajas:
Las ventajas del landrover robótico operado por teléfono celular incluyen un sistema de vigilancia y aprovisionamiento de control inalámbrico, navegación de vehículos basada en tecnología 3G y un alcance operativo ilimitado basado en la red del teléfono celular. La desventaja incluye: el costo ya que la facturación del teléfono celular es alta descarga de baterías móviles : el problema de descarga asociado a las baterías ya que las baterías pierden carga debido a la descarga rápida debido a que la carga es de alta adaptabilidad: el sistema no es adaptable a todos los teléfonos celulares, pero los que tienen el auricular conectado solo se pueden usar.
Por lo tanto, este proyecto de robot operado por teléfono celular es muy útil en aplicaciones militares para controlar vehículos militares mediante el uso de un teléfono móvil. En el futuro, podemos detectar la posición de los enemigos organizando un cámara inalámbrica al vehículo robótico Land Rover. Este proyecto también puede ser útil en el ámbito académico, ya que los estudiantes pueden aprender varias terminologías y principios propuestos en este proyecto. Este proyecto ayudará a los estudiantes a agregar sus pensamientos e ideas innovadores a desarrollar proyectos de robótica .
Créditos fotográficos:
- Land Rover operado por teléfono celular de santoshbanisetty
- Diagrama de circuito de Land Rover operado por teléfono celular de ingenieros de garaje







{kind=link}