El artículo que se presenta aquí explica un circuito controlador de velocidad de motor de CA de circuito cerrado muy simple que puede usarse para controlar velocidades de motor de CA monofásico.
El circuito es muy económico y utiliza componentes electrónicos ordinarios para las implementaciones requeridas. La característica principal del circuito es que es un tipo de circuito cerrado, lo que significa que la velocidad o el par del motor nunca pueden verse afectados por la carga o la velocidad del motor en este circuito, por el contrario, el par es indirectamente proporcional a la magnitud de la velocidad.
Operación del circuito:
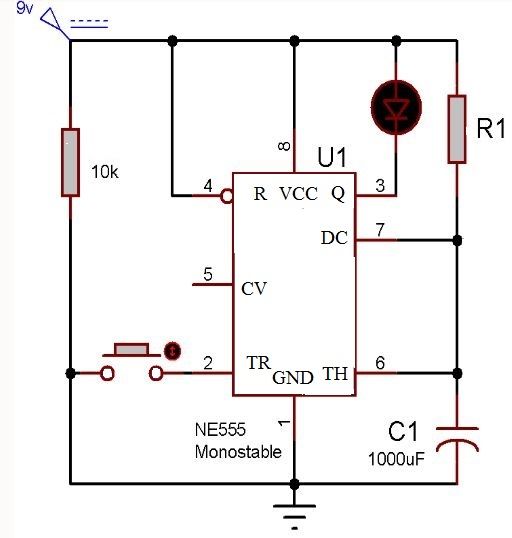
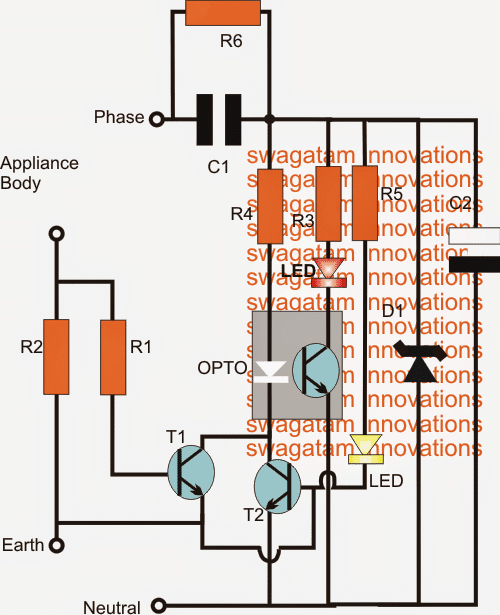
Refiriéndose al diagrama de circuito del controlador de motor de CA de circuito cerrado monofásico propuesto, las operaciones involucradas pueden entenderse a través de los siguientes puntos:
Para los semiciclos positivos de la entrada AC, el condensador C2 se carga a través de la resistencia R1 y el diodo D1.

La carga de C2 persiste hasta que el voltaje a través de este capacitor se vuelve equivalente al voltaje Zener de simulación de la configuración.
El circuito cableado alrededor del transistor T1 simula efectivamente el funcionamiento de un diodo Zener.
La inclusión del potenciómetro P1 permite ajustar la tensión de este “diodo zener”. Hablando con precisión, el voltaje desarrollado en T1 está literalmente determinado por la relación entre las resistencias R3 y R2 + P1.
El voltaje a través de la resistencia R4 siempre se mantiene igual a los 0.6 voltios que es igual al voltaje conductor requerido del voltaje del emisor base de T1.
Por lo tanto, significa que el voltaje zener explicado anteriormente debe ser igual al valor que se puede adquirir resolviendo la expresión:
(P1 + R2 + R3 / R3) × 0,6
Lista de piezas para el circuito controlador de velocidad del motor de CA de bucle cerrado anterior
- R1 = 39K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220 K,
- Todos los diodos = 1N4007,
- C1 = 0,1 / 400 V,
- C2 = 100 uF / 35 V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 vueltas de cable 25 SWG sobre una varilla de ferrita de 3 mm o 40 uH / 5 vatios
Cómo se coloca la carga por una razón especial
Una investigación cuidadosa revela que el motor o la carga no se introducen en la posición habitual, sino que se conectan justo después del SCR, en su cátodo.
Esto provoca que se introduzca una característica interesante con este circuito.
La posición especial anterior del motor dentro del circuito hace que el tiempo de encendido del SCR dependa de la diferencia de potencial entre el EMF trasero del motor y el “voltaje zener” del circuito.
Eso simplemente significa que cuanto más se carga el motor, más rápido se dispara el SCR.
El procedimiento simula bastante un tipo de funcionamiento de bucle cerrado en el que la retroalimentación se recibe en forma de EMF inversa generada por el propio motor.
Sin embargo, el circuito está asociado con un pequeño inconveniente. La adopción de un SCR significa que el circuito puede manejar solo 180 grados de control de fase y el motor no se puede controlar en todo el rango de velocidad, sino solo en el 50%.
Otra desventaja asociada debido a la naturaleza económica del circuito es que el motor tiende a producir hipo a velocidades más bajas, sin embargo, a medida que aumenta la velocidad, este problema desaparece por completo.
La función de L1 y C1
Se incluyen L1 y C1 para verificar las RF de alta frecuencia generadas debido al corte rápido de fase por parte del SCR.
No hace falta decir que el dispositivo (SCR) debe montarse en un disipador de calor adecuado para obtener resultados óptimos.
Circuito controlador de velocidad de perforación EMF trasero
Este circuito se utiliza principalmente para controlar la velocidad constante de motores bobinados en serie más pequeños, como se encuentran en varios taladros manuales eléctricos, etc. El par y la velocidad se controlan mediante el potenciómetro P1. Esta configuración de potenciómetro especifica con qué precisión se puede disparar el triac.

Cuando la velocidad del motor cae justo por debajo del valor preestablecido (con la carga conectada), entonces la EMF trasera del motor disminuye. Como resultado, el voltaje alrededor de R1, P1 y C5 aumenta de modo que el triac se activa antes y la velocidad del motor tiende a aumentar. De esta manera se consigue una cierta proporción de estabilidad de la velocidad.
Anterior: Cómo generar electricidad a partir del agua de mar: 2 métodos simples Siguiente artículo: Circuito de interruptor de control remoto de teléfono celular basado en GSM