Los robots se pueden utilizar en muchas aplicaciones en industrias, militares, domésticas. Uno de los principales usos de los robots es un activo para los seres humanos. Ya sea que se trate de cualquier tipo de situación peligrosa, como un incendio o un lugar lleno de minas terrestres, los robots pueden encontrar fácilmente una salida a estos problemas. Veamos estos dos tipos de robots: un robot sensor de minas terrestres y un robot contra incendios
Robot de detección de minas terrestres
¿Cómo sentir la mina terrestre con robots?
Una de las aplicaciones más importantes de la robótica es la defensa. Un robot en el ejército es un vehículo controlado a distancia con muchas características únicas. Puede ser un vehículo robótico con una cámara para espiar, un vehículo robótico con una pistola LÁSER para detectar y destruir objetivos, o un robot con un metal detector para detectar la presencia de minas terrestres.
Una de las formas tradicionales y convencionales de detección de minas es el uso de personal capacitado que busca manualmente metales o minas utilizando un detector de metales. Sin embargo, esto es peligroso, caro y lento.
Para superar este problema, se prefiere un sistema mucho más avanzado.
Un par de formas de detectar minas terrestres:
- Utilizando un robot que puede insertar una sonda en el suelo que puede detectar los objetos debajo del suelo y determinar el tipo de material.
- Usar un robot con un detector de metales que puede detectar la presencia de elementos conductores como minas terrestres y alarmar al usuario.
Antes de profundizar en los detalles sobre el segundo tipo, es decir, el robot con detector de metales, recordemos brevemente los dos términos importantes: minas terrestres y detector de metales.
A Mina terrestre es un artefacto explosivo colocado deliberadamente debajo del suelo que explota cuando se activa por presión. Según un informe estadístico, hay alrededor de 100 millones de minas terrestres en 70 países de todo el mundo. Una vez colocada una mina terrestre, puede funcionar hasta 50 años. ¿No es peligroso?

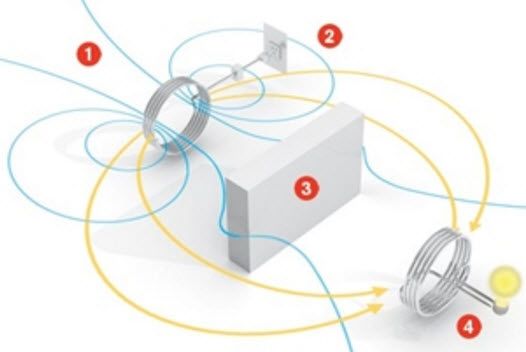
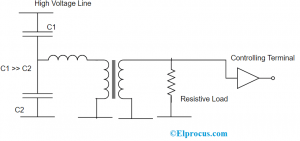
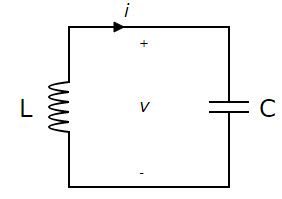
Un detector de metales básico funciona según el principio de la ley de inducción de Faraday. Consiste en una bobina que se energiza para desarrollar un campo magnético pulsante a su alrededor. Cuando la bobina se acerca a un elemento conductor como un metal (una mina), se induce una corriente eléctrica (corriente parásita). La corriente parásita inducida provoca el desarrollo de un campo electromagnético alrededor del metal, que se retransmite a la bobina que desarrolla una señal eléctrica que se analiza. Mayor es la distancia entre la bobina y el metal, más débil es el campo magnético.
Un prototipo simple:

Un prototipo simple de vehículo robótico con detector de metales
Diseñando el Robot:
El vehículo robótico consta de las siguientes unidades:
- Una base rectangular para soportar toda la estructura del robot, unida con dos ruedas para el movimiento.
- Un par de motores de CC para proporcionar el movimiento requerido al robot.
- Unidad de control que consta de un receptor de RF que recibe señales de comando de una unidad transmisora para controlar el controlador del motor y controlar los motores en consecuencia.
- Un circuito detector de metales junto con una alarma sonora se activa una vez que se detecta el metal.
¿Cómo funciona el robot?
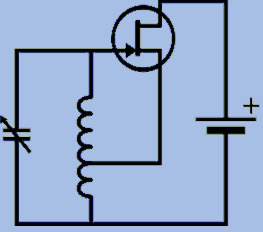
El circuito detector de metales incrustado en el circuito de control del robot consta de un transistor que es impulsado por un circuito oscilador sintonizado que consta de la bobina. Cuando se detecta un metal y la corriente eléctrica se retransmite a través de la bobina, el transistor1 está en condición de encendido y conduce otro transistor2 a la condición de apagado. Este transistor3, a su vez, lleva a otro transistor a la condición de apagado. Este transistor 3 en particular está conectado a otro transistor 4 que está conectado de tal manera que esté en condición cuando su transistor 3 controlador está en condición de apagado. El transistor 4 está conectado de tal manera que, en condición, el zumbador y el LED reciben la polarización adecuada y comienzan a conducir.

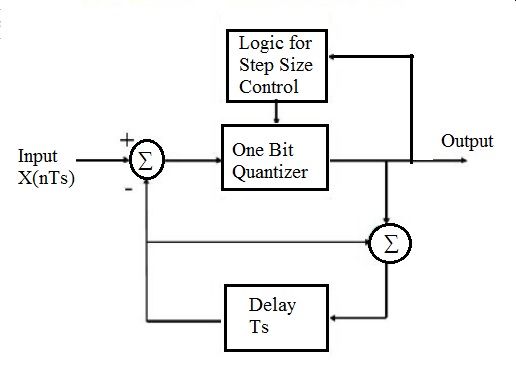
Diagrama de bloques de la unidad detectora de metales
El LED comienza a brillar y el zumbador comienza a sonar. Por lo tanto, cuando se detecta un metal, la alarma del zumbador comenzará a sonar y el LED se iluminará.
Controlando el Robot:
El prototipo simple se puede controlar mediante comunicación RF, que es un sistema de comunicación de corto alcance. Los comandos se transmiten mediante un transmisor y son recibidos por un receptor integrado en el circuito del robot para controlar el movimiento del robot.

Diagrama de bloques de la sección del transmisor
El transmisor consta de un conjunto de botones pulsadores como avance, retroceso, parada, izquierda y derecha que se presionan para proporcionar el movimiento del robot en cualquier dirección deseada. Los pulsadores están conectados al puerto de entrada del microcontrolador. El microcontrolador al recibir estas señales desarrolla una señal correspondiente de 4 bits en forma paralela a través de otro puerto de E / S, al que está conectado un codificador IC. El codificador convierte estas señales en una forma de datos en serie. El transmisor de RF modula estos datos en serie, que se transmiten a través de la antena.

Diagrama de bloques de la sección del receptor
La sección del receptor montada en el robot consta del receptor de RF que demodula esta señal. El decodificador IC recibe esta señal en forma de serie y desarrolla los correspondientes datos en paralelo de 4 bits en su salida. El microcontrolador recibe estos datos y, en consecuencia, proporciona una señal de control al controlador de motor IC LM293D, que impulsa ambos motores.
Vehículo robótico contra incendios:
El concepto de vehículo robótico de extinción de incendios está luchando en un incendio. En los últimos años ha habido varios accidentes graves, incluidos incendios y explosiones de bombas. Hemos estado conociendo sobre accidentes de incendios importantes como plantas de energía nuclear, petróleo, tanques de gas y fábricas de productos químicos, las empresas industriales de incendios a gran escala en estos lugares una vez que comenzaron el incendio, pueden resultar muy graves. Miles de personas han muerto en esta incidencia. Eso es una lucha contra incendios vehículo robótico tecnología. Este vehículo robótico solía encontrar el fuego y luchar por los incendios.

Vehículo robótico contra incendios
Principio de funcionamiento del vehículo robótico contra incendios:
El vehículo robot cargado con un camión cisterna de agua. La bomba se controla mediante comunicación inalámbrica (comunicación RF y móvil). El extremo del transmisor conectado a los pulsadores. Con este botón, los comandos se envían al receptor y controlan el momento del robot hacia adelante, hacia atrás, hacia la izquierda, hacia la derecha. Los tres motores del extremo receptor están conectados al microcontrolador.

Diagrama de bloques del transmisor

Diagrama de bloques del receptor
El transmisor de RF actúa como control remoto de RF cuando el alcance es de 200 metros. En el hogar, las oficinas y las industrias, los sensores de incendios se guardan en ciertos lugares cuando ocurre un incendio cerca de un sensor de incendios. Los sensores son un sentido de que el bit correspondiente se transmite al receptor de RF. El receptor de RF está integrado con un microcontrolador. Cuando el receptor de RF recibe las señales de que la información pasa al microcontrolador, el robot se mueve hacia los sensores de incendios. Las ubicaciones de los sensores se almacenan en el microcontrolador. Una vez que el robot llega a la ubicación deseada, el robot se detiene y activa el rociador a ese fuego. Después de disparar, el robot pasa a la posición inicial. Todo el circuito está controlado por el microcontrolador.
Tipos de vehículos robóticos contra incendios:
Inicio Vehículo robótico contra incendios :
La acción de campo está restringida al Flore actual de la casa. Este robot utiliza muchos artículos del hogar para prenderse fuego cuando alguien está dormido o no está. Este robot se utiliza para asegurar la casa y con esta aplicación todas las puertas se abren en Flore porque este vehículo se mueve de un lugar a otro en el hogar. El área de extinción de incendios debe ser segura para no provocar un nuevo accidente. La característica adicional de este robot es operar a larga distancia.
Lucha contra incendios industriales:
La mayoría de las industrias se enfrentan a problemas de accidentes de incendio como gas, gasolina, plantas de energía nuclear, industrias químicas con enormes daños y más personas mueren cerca de las áreas circundantes. Este robot tiene la fuerza para transportar fuego dentro del área en llamas para suministrar agua ilimitada. El fuego provoca una visibilidad reducida, calor extremo y muchas más situaciones que pueden provocar lesiones.
Lucha contra incendios forestales:
Los incendios forestales son muy peligrosos. Puede tardar poco tiempo en quemar una gran cantidad de bosque. Incluso los departamentos de bomberos de la ciudad tienen que lidiar con los incendios forestales en los alrededores de la ciudad. Hace algunos años, unos 152 bomberos murieron en la década de 1990. La robótica de incendios forestales se utiliza para atrapar el fuego y combatir el fuego. Este robot utiliza un dispositivo de control externo con fines de comunicación inalámbrica. El módulo está conectado con el extremo de salida del cual se utiliza para la extinción de incendios forestales del robot. Las aplicaciones como sensor de presión, sensor de temperatura, sensor de smog, sensor de infrarrojos, se utilizan para controlar el robot de extinción de incendios forestales.
En la prompt!
Si bien he dado una idea básica del robot con un detector de metales, todavía existe una pregunta importante: cómo guiar al robot en terrenos irregulares que se desconocen, especialmente en entornos sujetos a fuertes lluvias, polvo y rango de temperatura caliente. Para encontrar una respuesta y publicar sus comentarios.