Este controlador de motor IC versátil sin escobillas (BLDC) se ofrece para controlar cualquier motor BLDC trifásico de alto voltaje, alta corriente y efecto hall, equipado con sensor de efecto Hall, con extrema precisión y seguridad. Aprendamos los detalles en profundidad.

Uso del IC MC33035
El 'héroe' del circuito es el controlador de chip único MC33035, que es un módulo IC de segunda generación de alto rendimiento, que presenta todas las funciones activas requeridas que pueden ser necesarias para ejecutar la mayoría de los BLDC de alta corriente, alto voltaje, trifásicos o 4 fases. motores con una configuración de circuito abierto o circuito cerrado.

El IC está equipado con un decodificador de posición de rotor para permitir una secuencia de conmutación precisa, referencia compensada por temperatura para facilitar el voltaje correcto del sensor, un oscilador de diente de sierra de frecuencia programable, tres etapas de controlador de lado alto de colector abierto incorporadas y tres tótem de alta corriente controladores de lado bajo tipo, diseñados específicamente para operar una etapa de controlador de motor mosfet de alta potencia con puente H trifásico.
El chip también está reforzado internamente con características de protección de gama alta y etapas de control infalibles como bloqueo por bajo voltaje, limitación de corriente ciclo por ciclo a través de una opción de apagado con bloqueo de retardo ajustable, apagado interno por alta temperatura del IC y un diseño exclusivo Pinout de salida de falla que puede interconectarse con una MCU para un procesamiento avanzado preferido y retroalimentación.
Las funciones típicas que se pueden ejecutar con este IC son, control de velocidad de bucle abierto, control de dirección de marcha atrás, 'habilitación de marcha', una función de freno dinámico de emergencia.
El IC está diseñado para funcionar con sensores de motor que tienen fases de 60 a 300 grados o de 120 a 240 grados, como beneficio adicional, el IC también se puede usar para controlar los motores con escobillas tradicionales.
Cómo funciona el CI
El MC33035 se encuentra entre varios controladores de motor sin escobillas de CC monolíticos de alta eficiencia creados por Motorola .
Está compuesto por casi las capacidades necesarias para implementar un sistema de control de motor trifásico, de bucle abierto y con todas las funciones.
Además, el controlador se puede lograr para controlar motores de escobillas de CC. Diseñado con tecnología Bipolar Analog, presenta un nivel superior de eficiencia y durabilidad en un entorno industrializado despiadado.
El MC33035 lleva un decodificador de posición del rotor para una secuenciación de conmutación precisa, una referencia reembolsada por el entorno competente para entregar una potencia de sensor, un oscilador de diente de sierra programable en frecuencia, un amplificador de error totalmente accesible, un comparador de modulador de ancho de pulso, 3 salidas de unidad superior de colector abierto y 3 Las salidas del controlador inferior del tótem de alta corriente son las adecuadas para los MOSFET de potencia de funcionamiento.
El MC33035 incorpora capacidades de blindaje que incluyen bloqueo por subvoltaje, limitación de corriente ciclo por ciclo con un modo de apagado enclavado retardado seleccionable, apagado térmico incorporado, junto con una salida de falla exclusiva que se conectará convenientemente a un controlador de microprocesador.
Los atributos de control de motor estándar incorporan control de velocidad de bucle abierto, rotación hacia adelante o hacia atrás, habilitación de funcionamiento y frenado dinámico. Además de eso, el MC33035 tiene un pin de selección de 60 ° / 120 ° que configura el decodificador de situación del rotor para entradas de fase eléctrica del sensor de 60 ° o 120 °.

Funciones PIN OUT:
Pin1, 2, 24 (Bt, En, Ct) = Estas son las tres salidas de unidad superiores del IC especificadas para operar los dispositivos de potencia configurados externamente, como los BJT. Estos pines están configurados internamente como modo de colector abierto.
Pin # 3 (Adelante, Rev) = Este pinout está diseñado para controlar la dirección de rotación del motor.
Pin # 4, 5, 6 (Sa, Sb, Sc) = Estas son 3 salidas de sensor del IC asignadas para controlar la secuencia de control del motor.
Pin # 7 (salida habilitada) = Este pin del IC se asigna para habilitar la operación del motor siempre que se mantenga una lógica alta aquí, mientras que una lógica baja es para habilitar una marcha inercial del motor.
Pin # 8 (salida de referencia) = Este pin está habilitado con una corriente de suministro para cargar el condensador de temporización del oscilador Ct y también proporciona un nivel de referencia para el amplificador de error. También se puede utilizar para suministrar energía a los circuitos integrados del sensor de efecto Hall del motor.
Pin # 9 (entrada no inversora de detección de corriente) : La salida de señal de 100 mV se puede lograr desde este pinout con referencia al pin # 15 y se usa para cancelar la conducción del interruptor de salida durante un ciclo de oscilador específico. Este pinout normalmente se conecta con el lado superior de la resistencia de detección de corriente.
Pin # 10 (oscilador) : Este pinout determina la frecuencia del oscilador para el IC con la ayuda de la red RC Rt y Ct.
Pin # 11 (entrada no inversora del amplificador de error) : Este pinout se usa con el potenciómetro de control de velocidad.
Pin # 12 (Entrada de inversión de amplificador de error) : Este pin está conectado internamente con la salida de amplificador de error mencionada anteriormente para habilitar las aplicaciones de bucle abierto .
Pin # 13 (Salida de amplificador de error / Entrada PWM) : La función de este pinout es proporcionar compensación durante aplicaciones de circuito cerrado.
Pin # 14 (Salida de falla) : Esta salida del indicador de falla puede convertirse en una lógica baja activa durante algunas condiciones críticas tales como: Código de entrada no válido para el sensor, Habilitar pinout alimentado con lógica cero, Pinout de entrada de detección de corriente superior a 100mV (@ pin9 con referencia a pin15) , activación del bloqueo por bajo voltaje o una situación de apagado térmico).
Pin # 15 (entrada de inversión de detección de corriente) : Este pin está configurado para proporcionar el nivel de referencia para el umbral interno de 100 mV y puede verse conectado con la resistencia de detección de corriente del lado inferior.
Pin # 16 (GND) : Este es el pin de tierra del IC y está diseñado para proporcionar la señal de tierra al circuito de control y se requiere que se haga referencia a la tierra de la fuente de energía.
Pin # 17: (Vcc) : Este es el pin positivo de suministro especificado para proporcionar el voltaje positivo al circuito de control del IC. El rango mínimo de operación de este pin es de 10 V y el máximo de 30 V.
Pin # 18 (Vc) : Este pinout establece el estado alto (Voh) para las salidas del variador inferior a través de la potencia atribuida a este pin. El escenario funciona con el rango de 10 a 30V.
Pin # 19, 20, 21 (Cb, Bb, Ab) : Estos tres pines están dispuestos internamente en forma de salidas de tótem y están asignados para controlar los dispositivos de potencia de salida del variador inferior.
Pin # 22 (selección de cambio de fase 60 D, 120D) : El estado atribuido a este pinout configura el funcionamiento del circuito de control con los sensores de efecto Hall para entradas de ángulo de fase de 60 grados (lógica alta) o 120 grados (lógica baja).
Pin # 23 (freno) : Una lógica baja en este pinout permitirá que el motor BLDC funcione sin problemas, mientras que una lógica alta detendrá instantáneamente la operación del motor a través de una rápida desaceleración.
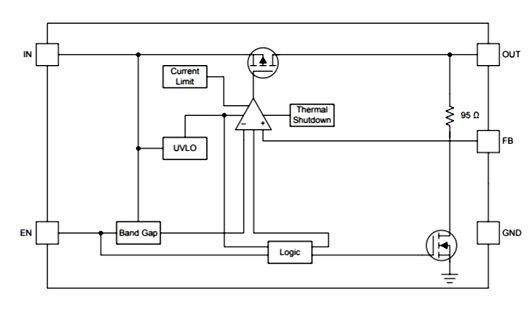
DESCRIPCION FUNCIONAL
En la figura anterior se muestra un diagrama de bloques interno representativo. Un discurso sobre los beneficios y funcionamiento de cada uno de los bloques centrales que se enumeran a continuación.
Decodificador de posición del rotor
Un decodificador de posición del rotor interno mide las 3 entradas de sensor (pines 4, 5, 6) para representar la secuencia correcta de los pines de mando superior e inferior. Las entradas del sensor están fabricadas para interactuar directamente con interruptores de efecto Hall de colector abierto o acopladores opto ranurados.
Las resistencias pull-up incorporadas se clasifican para reducir la cantidad necesaria de piezas externas. Las entradas son compatibles con TTL, con sus umbrales característicos de 2,2 V.
La gama de circuitos integrados MC33035 está diseñada para controlar motores trifásicos y funcionar con 4 de las convenciones más populares de fase de sensores. Se suministra convenientemente un selector de 60 ° / 120 ° (clavija 22) y proporciona al MC33035 para que se configure solo para regular motores que tienen una fase de sensor eléctrico de 60 °, 120 °, 240 ° o 300 °.
Con 3 entradas de sensor, descubrirá 8 posibles formaciones de código de entrada, 6 de las cuales son ubicaciones de rotor legítimas.
Los otros dos códigos están desactualizados ya que generalmente son el resultado de una conexión de sensor abierta o en corto.
Con 6 códigos de entrada justificables, el decodificador posiblemente se encargue de la posición del rotor del motor dentro de un espectro de 60 grados eléctricos.
La entrada de avance / retroceso (pin 3) se usa como una herramienta para modificar el curso del programa del motor invirtiendo el voltaje a través del devanado del estator.
Tan pronto como la entrada cambia de estado, de alto a bajo usando un código de programa de entrada de sensor asignado (por ejemplo 100), las salidas del variador superior y base facilitadas que usan el mismo estado alfa se intercambian (AT a AB, BT a BB, CT a CB).
Esencialmente, la cuerda cambiante cambia de dirección y el motor invierte la secuencia direccional. El control de encendido / apagado del motor se logra mediante la habilitación de salida (pin 7).
Siempre que se deje desconectado, un suministro de corriente interno de 25 μA permite la secuenciación de las salidas del variador principal y base. Cuando están conectadas a tierra, las salidas del variador de la parte superior se apagan y los variadores de la base se empujan a bajo, provocando que el motor se desactive y la salida de falla se dispare.
El frenado dinámico del motor permite desarrollar un margen de protección sobrante en el dispositivo final. El sistema de frenado se logra poniendo su entrada de freno (pin 23) en un estado superior.
Esto lleva a que las salidas de la unidad superior se apaguen y que las unidades inferiores se activen, provocando un cortocircuito en la EMF generada por el motor. La entrada del freno posee una consideración absoluta y sincera sobre todas las demás entradas. El resistor pull-up interno de 40 kΩ se conecta mediante el interruptor de seguridad del programa garantizando la activación del freno en caso de que se abra o se apague.
La tabla de verdad de la lógica de conmutación se muestra a continuación. Se emplea una puerta NOR de 4 entradas para examinar la entrada del freno y las entradas a los 3 BJT de salida del controlador superior.

El objetivo suele ser desactivar el frenado antes de que las salidas de la transmisión superior alcancen un estado alto. Esto le permite evitar el arrendamiento sincronizado de los interruptores de alimentación superior y base.
En los programas de transmisión de motor de media onda, los componentes de transmisión superior generalmente no son necesarios y en la mayoría de los casos se mantienen separados. Con este tipo de circunstancias, el frenado aún se logrará porque la puerta NOR detecta el voltaje base en los BJT de salida del controlador superior.
Amplificador de error
Se ofrece un amplificador de error de eficiencia mejorada y totalmente compensado con acceso activo a cada entrada y salida (pines n. ° 11, 12, 13) para ayudar en la ejecución del control de velocidad del motor de bucle cerrado.
El amplificador viene con una ganancia de voltaje de CC estándar de 80 dB, un ancho de banda de ganancia de 0.6 MHz, junto con un amplio rango de voltaje de modo común de entrada que se extiende desde el suelo hasta Vref.
En la mayoría de los programas de control de velocidad de bucle abierto, el amplificador se configura como un seguidor de voltaje de ganancia unitaria con la entrada no inversora acoplada al suministro de voltaje de ajuste de velocidad.
Oscilador La frecuencia del oscilador de rampa interior está cableada a través de los valores decididos para los elementos de tiempo RT y CT.
El condensador CT se cargará a través de la salida de referencia (pin 8) por medio de la resistencia RT y se descargará a través de un transistor de descarga interno.
Los voltajes de pico y rampa de rampa son normalmente 4,1 V y 1,5 V, correspondientemente. Para ofrecer una reducción decente entre el ruido audible y el rendimiento de conmutación de salida, se sugiere una frecuencia de oscilador en la selección de 20 a 30 kHz. Consulte la Figura 1 para la selección de componentes.
Modulador de ancho de pulso
La modulación de ancho de pulso integrada ofrece un enfoque de potencia efectiva para controlar la velocidad del motor al alterar el voltaje estándar asignado a cada devanado del estator en toda la serie de conmutación.
A medida que el CT se descarga, el oscilador modela cada enclavamiento, lo que permite la conducción de las salidas del variador superior e inferior. El comparador PWM restablece el pestillo superior, terminando el arrendamiento de salida del variador inferior una vez que la rampa positiva de CT se convierte en un exceso del resultado del amplificador de error.
El diagrama de temporización del modulador de ancho de pulso se muestra en la Figura 21.
La modulación de ancho de pulso para la gestión de la velocidad se presenta exclusivamente en las salidas inferiores del variador. Límite de corriente El funcionamiento constante de un motor que puede estar significativamente sobrecargado conduce a un sobrecalentamiento y un mal funcionamiento inevitable.
Esta situación perjudicial se puede evitar fácilmente junto con el uso de la restricción de corriente ciclo por ciclo.
Es decir, todos los ciclos encendidos se tratan como una función independiente. La restricción de corriente ciclo por ciclo se logra rastreando la acumulación de corriente del estator cada vez que se dispara un interruptor de salida, y después de detectar una situación de alta corriente, deshabilitar instantáneamente el interruptor y retenerlo apagado durante el período pendiente del intervalo de aceleración del oscilador.
La corriente del estator se transforma en voltaje mediante la aplicación de una resistencia de detección RS (Figura 36) con referencia a tierra en línea con los 3 transistores de conmutación de la parte inferior (Q4, Q5, Q6).
El voltaje establecido a lo largo de la resistencia de anticipación se supervisa con la entrada de detección de corriente (pines 9 y 15) y se compara con el punto de referencia interno de 100 mV.
Las entradas del comparador de detección actual vienen con un rango de modo común de entrada de aproximadamente 3,0 V.
En caso de que se supere la tolerancia de detección de corriente de 100 mV, el comparador restablece el bloqueo de detección inferior y finaliza la conducción del interruptor de salida. El valor de la resistencia de detección de corriente es en realidad:
Rs = 0,1 / Istator (máx.)
La salida de falla se inicia en una situación de alto amperaje. La configuración de PWM de doble pestillo asegura que surja un solo pulso de disparo de salida en el curso de una determinada rutina de oscilador, ya sea que finalice o no a través de la salida del amplificador de error o del comparador de límite de corriente.
El regulador en chip de 6.25 V (Pin 8) ofrece corriente de carga para el condensador de sincronización del oscilador, un punto de referencia para el amplificador de error, que le permite suministrar 20 mA de corriente apropiada para alimentar específicamente sensores en programas de bajo voltaje.
En propósitos de voltaje mayor, esto podría llegar a ser importante para intercambiar la energía emitida por el regulador fuera del IC. Esto definitivamente se logra con la ayuda de otro transistor de paso, como se muestra en la Figura 22.
Parecía que se decidió un punto de referencia de 6.25 V para permitir la representación del circuito NPN sencillo, donde Vref - VBE supera el voltaje mínimo esencial de los sensores de efecto Hall sobre el calor.
Con una variedad adecuada de transistores y suficiente disipador de calor, se puede comprar hasta 1 amperio de corriente de carga.
Bloqueo por subtensión
Se ha integrado un bloqueo de subtensión de tres vías para reducir el daño al IC y a los transistores del interruptor de alimentación alternativo. Durante factores de suministro de energía bajos, garantiza el hecho de que el IC y los sensores sean completamente funcionales y que haya un voltaje de salida de la unidad base adecuado.
Las fuentes de alimentación positivas al IC (VCC) y las unidades bajas (VC) son examinadas por comparadores independientes que obtienen sus umbrales en 9.1 V.Esta etapa en particular garantiza la conmutación adecuada de la puerta necesaria para lograr un RDS bajo (encendido) siempre que se active la energía ordinaria Equipo MOSFET.
Siempre que se energizan directamente los sensores Hall desde la referencia, aparece un funcionamiento inadecuado del sensor en caso de que el voltaje de salida del punto de referencia caiga por debajo de 4,5 V.
Se puede utilizar un tercer comparador para reconocer este problema.
Cuando más de uno de los comparadores detecta una situación de subtensión, la salida de falla se enciende, los recorridos superiores se posponen y las salidas del variador base se organizan en un punto bajo.
Cada uno de los comparadores incorpora histéresis para proteger contra las amplitudes al puentear sus umbrales individuales.
Salida de falla
La salida de falla del colector abierto (pin 14) tenía la intención de ofrecer detalles de análisis en caso de una falla del proceso. Tiene una capacidad de corriente de disipación de 16 mA y puede activar específicamente un diodo emisor de luz para una señal visible. Además, en realidad está convenientemente interconectado con la lógica TTL / CMOS para su uso en un programa gobernado por microprocesador.
La salida de falla es efectiva baja mientras ocurre más de una de las situaciones siguientes:
1) Códigos de entrada de sensor no válidos
2) Habilitación de salida en lógica [0]
3) Entrada de detección de corriente superior a 100 mV
4) Bloqueo por subtensión, activación de 1 o más de los comparadores
5) Apagado por calor, máxima temperatura de unión óptima Esta salida exclusiva también puede usarse para diferenciar entre el arranque del motor o el funcionamiento prolongado en una situación de inundación.
Con la ayuda de una red RC entre la salida de falla y la entrada de habilitación, esto significa que puede desarrollar un apagado enclavado retardado con respecto a la sobrecorriente.
Los circuitos adicionales que se muestran en la Figura 23 ayudan a que los sistemas de motor que están equipados con cargas de inercia más altas se pongan en marcha sin esfuerzo al proporcionar un par de captación adicional, al mismo tiempo que protegen la protección contra sobrecorriente. Esta tarea se logra colocando el límite actual en el valor siguiente al mínimo durante un período establecido. En el curso de una situación de sobrecorriente excesivamente prolongada, el condensador CDLY se cargará, evocando la entrada de habilitación para superar su tolerancia a una condición baja.
Ahora se puede dar forma a un pestillo mediante el ciclo de retroalimentación positiva desde la salida de falla hasta la habilitación de salida. Cuando se establece, mediante la entrada de detección de corriente, solo se puede restablecer haciendo un cortocircuito CDLY o ciclando las fuentes de alimentación.
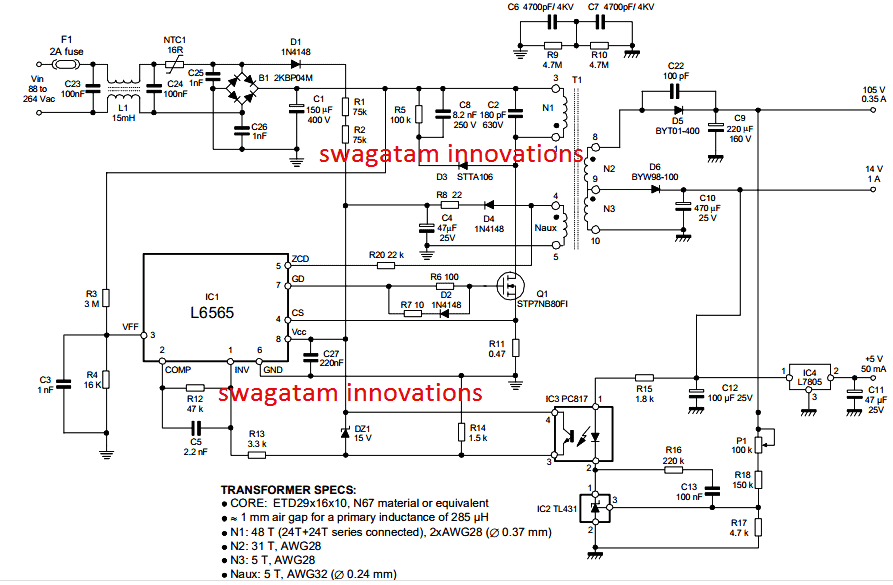
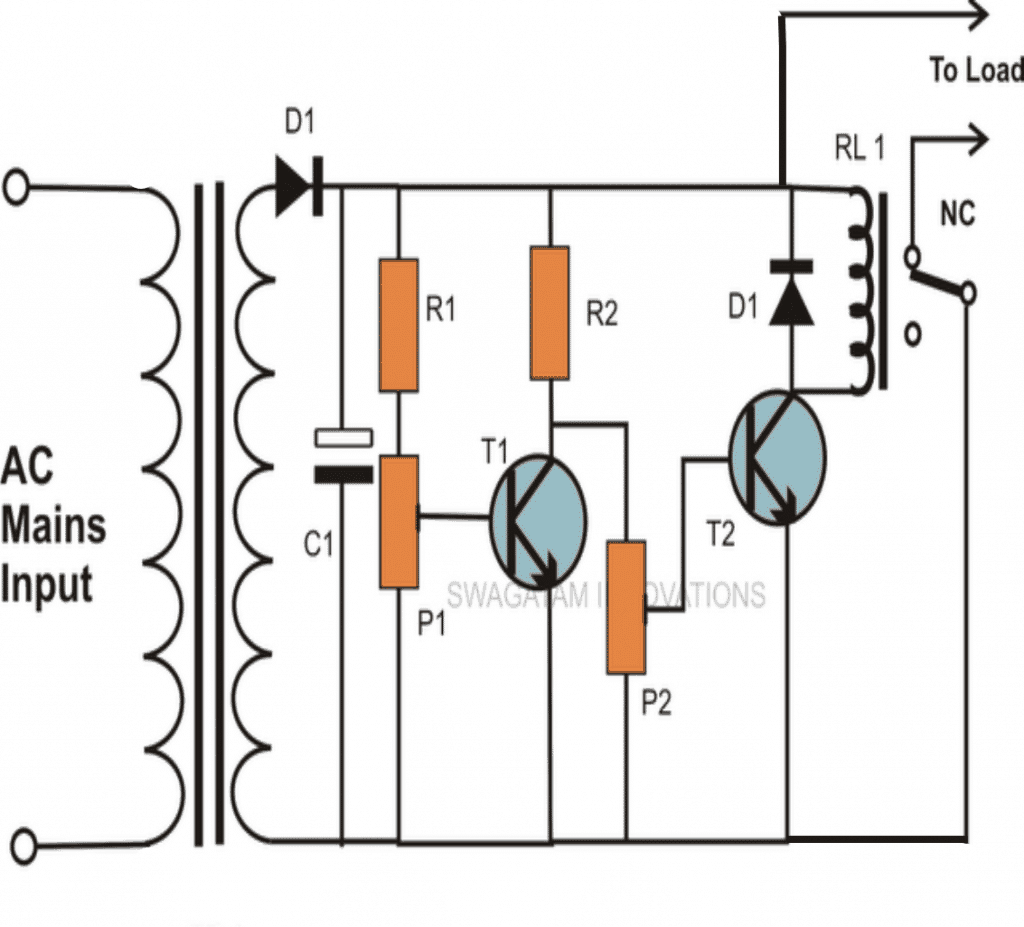
Esquema de BLDC de alto vataje completamente funcional
Un circuito controlador BLDC de alto voltaje y alta corriente completamente funcional que utiliza el dispositivo explicado anteriormente puede verse a continuación, está configurado como un modo de onda completa, trifásico, de 6 pasos:

Anterior: Cálculo de voltaje, corriente en un inductor reductor Siguiente: Hacer este circuito de scooter eléctrico / rickshaw