En esta publicación vamos a aprender qué es el servomotor, cómo funciona, cómo interactuar con el microcontrolador y qué hace que este motor sea especial de otros motores.
Siendo un entusiasta de la electrónica, nos habríamos encontrado con muchos tipos de motores, aquí vamos a echar un vistazo a un tipo especial de motor llamado servomotor.
¿Qué es un servomotor?
El servomotor o simplemente el servo es un tipo especial de motor que está diseñado para un control preciso de la posición, la aceleración y la velocidad. A diferencia de todos los demás tipos de motores, el servo solo puede girar 180 grados bidireccionalmente. Tiene engranajes mecánicos y tope que limitan el giro angular del servo.
Servomotor típico:

Los servomotores se utilizan en robótica, cámaras CCTV, coches RC, barcos, aviones de juguete, etc. Los servos se utilizan cuando no necesitamos un movimiento rotatorio continuo, sino que nos bloqueamos en una posición específica o movemos alguna carga con velocidad controlada dentro del límite angular móvil.
Los servos no son simplemente un motor como otros tipos, sino que son un módulo que combina un motor CC / CA normal, un grupo de engranajes, electrónica de control y un sistema de retroalimentación. Veamos en detalle cada una de las etapas mencionadas.
El motor CC / CA que se emplea en un módulo de servo puede ser un motor sin escobillas o con escobillas, en la mayoría de los servos de hobby se usa el motor CC y los motores CA se usan en aplicaciones industriales. El motor da entrada rotacional al servo. El motor gira a varios cientos de RPM dentro del servo y la rotación de salida es aproximadamente 50 o más veces menor que sus RPM.
La siguiente etapa es el conjunto de engranajes, que controla la rotación angular y la velocidad del servo. El equipo puede estar hecho de plástico o metal, dependiendo de qué tan voluminosa sea la carga. Generalmente, los motores de CC funcionan a altas RPM y un par bajo, el conjunto de engranajes convertirá el exceso de RPM en par. Por tanto, un motor pequeño puede soportar una carga enorme.
La siguiente etapa es la electrónica de control que se compone de MOSFET e IC para controlar la rotación del motor. Un sistema de retroalimentación siempre está presente en los servomotores para rastrear la posición actual del actuador.
En los servos, generalmente, un componente de retroalimentación es un potenciómetro, que está conectado directamente al actuador giratorio. El potenciómetro actúa como divisor de voltaje que se alimenta a la electrónica de control. Esta retroalimentación ayuda a controlar la electrónica para determinar la cantidad de energía que se le da al motor.
Un servomotor en una posición fija se moverá reacio de su posición actual si alguna fuerza externa intenta molestar. El sistema de retroalimentación monitorea la posición actual y alimenta el motor contra perturbaciones externas.
El escenario anterior es el mismo cuando el servo está moviendo su actuador. El sistema de control compensará la fuerza externa y se moverá a una velocidad determinada.
A estas alturas ya sabe bastante sobre el servomotor y su mecanismo de funcionamiento. Veamos cómo controlar los servomotores usando un microcontrolador.
Los servomotores tienen 3 terminales a diferencia de otros motores que tienen 2 terminales, dos para suministro (5V nominal) y uno para señal de control. Los cables están coloreados para facilitar la identificación de los terminales.
Las señales de control de los servos son PWM a una frecuencia de 50Hz. El ancho de pulso de la señal determina la posición del brazo del actuador. Un servomotor de hobby típico opera desde 1 a 2 milisegundos de ancho de pulso.
La aplicación de una señal de control de ancho de pulso de 1 ms mantendrá el actuador en la posición de 0 grados. La aplicación de una señal de control de ancho de pulso de 2 ms mantendrá el actuador en la posición de 180 grados. La aplicación de señales entre 1-2 ms mantendrá el actuador dentro de un ángulo de 0-180 grados. Esto se puede entender mejor con la siguiente imagen.

A estas alturas ya habría entendido cómo se controla un servo mediante modulación de ancho de pulso (PWM).
Ahora aprendamos cómo conectar un servomotor con Arduino.
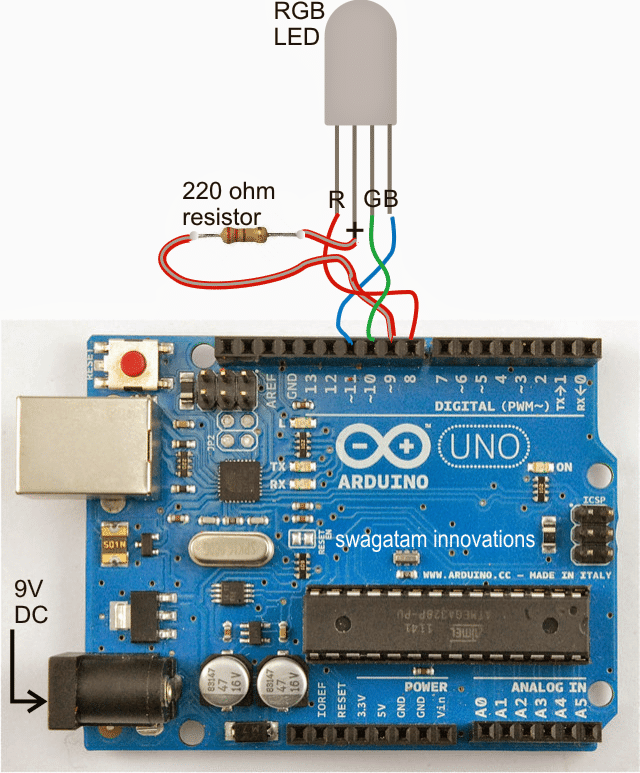
Diagrama de circuito:

El cableado es fácil y autoexplicativo. Necesita una fuente de alimentación externa si está utilizando un servomotor voluminoso. Si intenta alimentar desde la fuente de alimentación de arduino, terminará sobrecargando el puerto USB de la computadora.
Si tiene un servo similar que se ilustra al principio del artículo, puede alimentarlo con la fuente arduino 5V, que también se muestra en el prototipo del autor.
Prototipo del autor:

Arduino necesita una biblioteca de servos para manejarlo, hizo nuestra tarea fácil y ya está en el IDE de Arduino.
Programa:
|_+_|
El programa anterior barrerá el actuador de 0 a 180 grados a la derecha y de 180 a 0 grados a la izquierda y repetirá el ciclo. Este es un programa simple para probar el servo que puede necesitar para escribir su propio código para sus aplicaciones personalizadas.
Artículo anterior: Circuito controlador de válvula de bomba de agua de dos tuberías Siguiente artículo: Comprensión del cableado del regulador de voltaje de la motocicleta