En esta publicación, aprendemos un circuito de temporizador de avance inverso para operar un mecanismo de motor de incubadora con un conjunto preferido de movimientos. La idea fue solicitada por el Sr.Anwar
Especificaciones técnicas
Soy de Indonesia ... Necesito esquemas para el temporizador de la incubadora con motor de alto par (ventana eléctrica del motor de CC en el automóvil). Estoy tratando de hacer que un motor de CC funcione en dos direcciones hasta que alcance la posición final, luego se detenga y cambie la polaridad para que funcione en la otra dirección cuando se vuelva a aplicar la energía. Luego haz lo mismo en el otro extremo.
1. El temporizador enciende la alimentación durante 1 minuto. (7:00 am -7: 01am)
2. el motor funciona en una dirección hasta que llega a la posición de parada, digamos 30 segundos.
3. La energía del motor se apaga cuando llega a la posición de parada y se demora 1 minuto. temporizador para finalizar / apagar la alimentación principal. también invierte la polaridad para que.
4. la próxima vez que se encienda el temporizador principal (10: 00-10: 01) dosificará lo mismo en sentido inverso y se repite continuamente
5. Motor de 12 VCC inverso (solo dos cables del motor + y -)
6. Necesita indicador LED para motor Rev / Fwd
¿Puede ayudarme señor?
Gracias de antemano por cualquier ayuda.
Este es un proyecto de hogar importante que debe ser 100% confiable.
El diseño

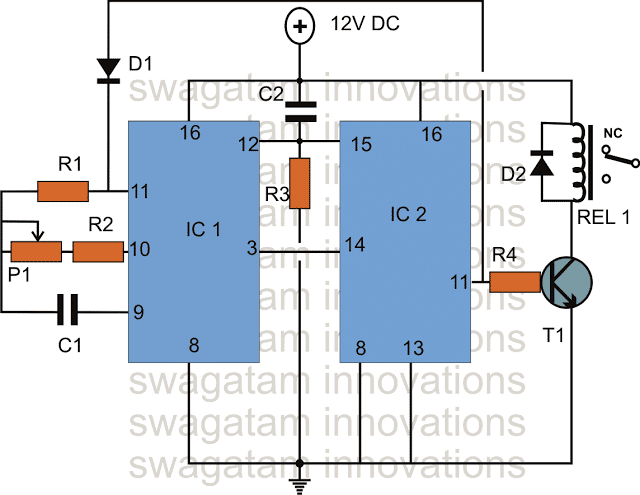
En la figura anterior podemos visualizar un diseño para implementar el movimiento de avance inverso propuesto de un motor de incubadora después de un intervalo de tiempo predeterminado.
En el instante en que se enciende la energía, tenemos el siguiente escenario:
Se puede suponer que el interruptor magnético para 'configurar' está en un estado desactivado o presionado mientras el motor o el mecanismo de incubadora diseñado está en su posición de arranque cero.
Tenga en cuenta que, preferiblemente, los interruptores de 'ajuste' / 'reinicio' deben implementarse utilizando interruptores de lengüeta magnéticos.
Con la energía encendida, IC 4060 se restablece a través de C2 para que inicie el proceso de conteo desde cero, y el pin3 se convierte en lógica cero.
Esta lógica cero inicial se alimenta a través de C3 a la base de T1 que conduce instantáneamente a forzar a T3 y su relé asociado a activarse. R7 en el proceso asegura que T1 / T3 se bloquee en este modo.
El relé DPDT en este punto se activa en sus contactos N / O iniciando el motor y el mecanismo hacia un supuesto movimiento 'hacia adelante'.
Tan pronto como el motor comienza a moverse, el botón 'set' se suelta de manera que T4 y el SPDT superior tienen la oportunidad de actuar, en donde el relé SPDT alcanza un cambio de posición N / O dejando los contactos N / C del DPDT en espera. suministro..
El motor y / o el mecanismo sigue moviéndose hasta que alcanza la posición de 'reinicio' que hace que T2 se active y rompa el pestillo T1 / T4.
Con T4 apagado, el relé DPDT cambia su posición de N / O a N / C y proporciona un movimiento opuesto (inverso) al mecanismo del motor.
El mecanismo del motor de la incubadora ahora cambia su dirección e inicia un movimiento inverso hasta que alcanza el punto de 'ajuste' que apaga rápidamente el accionamiento base del T4, el SPDT apaga la potencia de corte del DPDT y todo el mecanismo se detiene .
Mientras tanto, el IC 4060 continúa contando hasta que una vez más haya producido una lógica cero después de pasar por una lógica alta en su pin3 (descargando C3).
El ciclo vuelve a iniciarse y repite el procedimiento como se explicó anteriormente.
Anterior: Parpadeo de un LED con Arduino - Tutorial completo Siguiente artículo: Se explora el supresor de sobretensiones de red industrial de alta potencia