El artículo analiza un circuito de control remoto infrarrojo (IR) simple que está configurado para operar un motor de CC en respuesta a la conmutación realizada desde un teléfono remoto IR estándar, como un control remoto de TV o un control remoto de DVD.
El motor conectado se puede mover en ambos sentidos y también se puede detener.
El circuito se puede entender con las siguientes explicaciones:
Cómo funciona
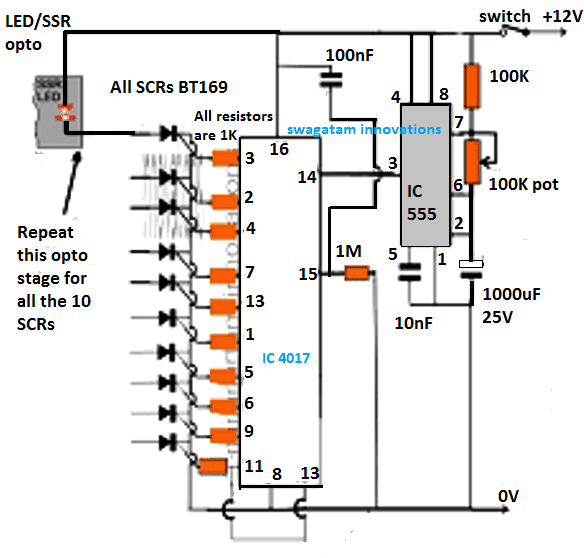
Como se puede ver en el diagrama de circuito dado, el sensor es cualquier módulo de sensor de infrarrojos estándar de tres pines que normalmente respondería a cualquier mando a distancia de infrarrojos de TV.
Cuando un rayo IR (infrarrojo) se enfoca en el sensor, el pin que se designa como salida se vuelve lógicamente bajo. Esta situación persiste mientras el rayo permanezca enfocado en ella.
El transistor T1 que es un PNP responde a esta señal lógica baja y conduce la conmutación del relé adjunto RL1.
Los contactos conectan instantáneamente el potencial positivo instantáneo en el colector del transistor al pin # 14 del IC1 que está cableado como un circuito flip flop.
Suponiendo que la secuencia lógica inicial esté en el pin n. ° 3 del IC, el disparo anterior cambia la secuencia al pin n. ° 2 del IC, haciéndolo alto.
Esto enciende T2 y el relé correspondiente RL2.
RL2 conduce y conecta el cable particular del motor al suministro negativo. Dado que la otra terminal del motor obtiene un positivo de RL3, comienza a moverse en la dirección establecida.
Ahora suponga que el sensor recibe un disparo posterior a través del mando a distancia por infrarrojos, el proceso anterior se repite y la secuencia de salida cambia del pin n. ° 2 al pin n. ° 4 de IC1, que instantáneamente enciende T3 mientras apaga T2.
La acción anterior revierte las conexiones del relé, lo que obliga al motor a cambiar instantáneamente su dirección de rotación.
Con otro disparo posterior desde el mando a distancia, la secuencia rebota de vuelta al pin # 3, que no está conectado a nada y resulta en el apagado del motor por completo.
La inclusión de L1, C1 asegura que los circuitos no se vean influenciados por la activación espuria del sensor.
L1 se puede experimentar para obtener el valor óptimo de modo que 'conecte a tierra' solo señales externas perdidas accidentales y no las señales de infrarrojos reales de un teléfono de control remoto.


Lista de piezas para el circuito de motor de control remoto IR (infrarrojo) anterior.
R1 = 100 ohmios,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22 uF
C5 = 1000 uF / 25 V
C6 = 0,22 uF
L1 = estrangulador 100mH
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Todos los relés = 12V / 400 ohmios / SPDT
sensor = TSOP1738
Motor = motor de 12V CC
Anterior: Uso de un termistor NTC como supresor de sobretensión Siguiente artículo: Circuito de fuente de alimentación compacto MJE13005 220V