
El término Robot fue introducido por primera vez por un dramaturgo checo Karel Capek en el año 1920. La palabra robot también se usa para describir un dispositivo mecánico inteligente. La robótica es una de las ramas de la tecnología y se ocupa del diseño, creación, operaciones y aplicaciones de robots . La palabra robótica se deriva de la palabra robot. Hay principalmente cuatro tipos de robots disponible en el mercado hoy: tipo de serie, tipo móvil, tipo paralelo y tipo andante. Los elementos de los robots son manipuladores, efectores finales, pinzas, fuente de alimentación y controladores. Este artículo enumera proyectos de robótica basados en microcontroladores para estudiantes de ingeniería.
¿Qué es un robot?
Cuando pensamos en un robot, lo primero que nos viene a la mente es que es una máquina que imita a un humano. Pero en términos reales, no existe una definición estándar para un robot. Sin embargo, hay algunas características fundamentales que un robot debe tener, por ejemplo: detección, movimiento, energía e inteligencia. Algunos robots pueden trabajar por sí mismos y realizar determinadas tareas, mientras que otros robots necesitan la intervención y la ayuda de los seres humanos. Los robots se utilizan en muchas aplicaciones como medios, comunicación espacial y aplicaciones militares.
El gasto en máquinas herramienta ha ido creciendo a pasos agigantados en los sectores de la electrónica y del automóvil. Según la investigación de la industria, India ha gastado casi miles de millones de rupias en máquinas herramienta. Para llevar adelante la demanda de sistemas robóticos rentables, los robots con sede en Bangalore están activos y una empresa lanzó dos de sus robóticas rentables: Artrimus y G4. Artimus es un brazo robótico rentable y G4 es un robot de pórtico de alta velocidad.

Proyectos de robótica usando microcontrolador
¿Qué son los robots industriales?
Los robots industriales definidos por la organización internacional (ISO) para la estandarización son manipuladores repetidamente controlados, reprogramables y multiuso, y programables en muchos ejes. Estos robots están diseñados para mover piezas, materiales y herramientas y para realizar una variedad de tareas en la fabricación y producción.
Los robots industriales modernos son verdaderas sensaciones de la ingeniería. Estos robots pueden transportar una carga de alrededor de cien libras y moverla muy rápidamente con repetibilidad. Estos robots son programables en muchas aplicaciones y se utilizan en la industria automotriz para aplicaciones de ensamblaje, soldadura por arco y manipulación de materiales.

Robots industriales
Proyectos de robótica basados en microcontroladores para estudiantes de ingeniería
La siguiente lista proporciona proyectos de robótica rentables basados en microcontroladores, lo cual es útil para los estudiantes. Entonces, los proyectos de robótica basados en microcontroladores para estudiantes de ingeniería incluyen lo siguiente.
Robot de Telepresencia Virtual
Este proyecto se utiliza para diseñar un robot de telepresencia. En este robot, una cámara está dispuesta dentro de un área remota para capturar los alrededores de forma visual con la ayuda de Raspberry Pi. Estas imágenes se muestran en la realidad virtual de los auriculares del usuario.
Una característica adicional permite que la cámara se interponga en el camino de los movimientos de la cabeza del usuario para brindar una experiencia inmediata al usuario porque si está allí donde se coloque el robot de un robot de telepresencia virtual. Este tipo de robot también va de cualquier forma utilizando una aplicación instalada dentro del Smartphone del usuario.
Robot de fútbol
Este proyecto se utiliza para diseñar un robot de fútbol. Este robot puede moverse en diferentes direcciones como hacia adelante, derecha, reversa e izquierda usando una aplicación de Android. El movimiento de velocidad del robot se puede controlar a través del ángulo de rotación del teléfono. Una vez que se agita el teléfono inteligente, este robot pateará una pelota.
Robot para detección de metales
Este proyecto implementa un robot que utiliza un microcontrolador que se utiliza para detectar metales en el carril frente a él. Este tipo de robot es muy útil para detectar minas terrestres y metales en el suelo. Este proyecto utiliza tecnología de RF para controlar el robot.
Robot para detección humana
Hay diferentes robots de detección de humanos disponibles según la aplicación. Pero durante los terremotos, para un equipo de rescate, es muy difícil detectar a los humanos debajo de las construcciones, ya que lleva mucho tiempo. Para superar este problema en esas situaciones, se implementa el robot de detección de humanos para detectar el tiempo inapropiado del humano utilizando un sensor de detección de humanos. Este robot de detección de personas se puede operar manualmente a través de la tecnología de RF utilizando una PC
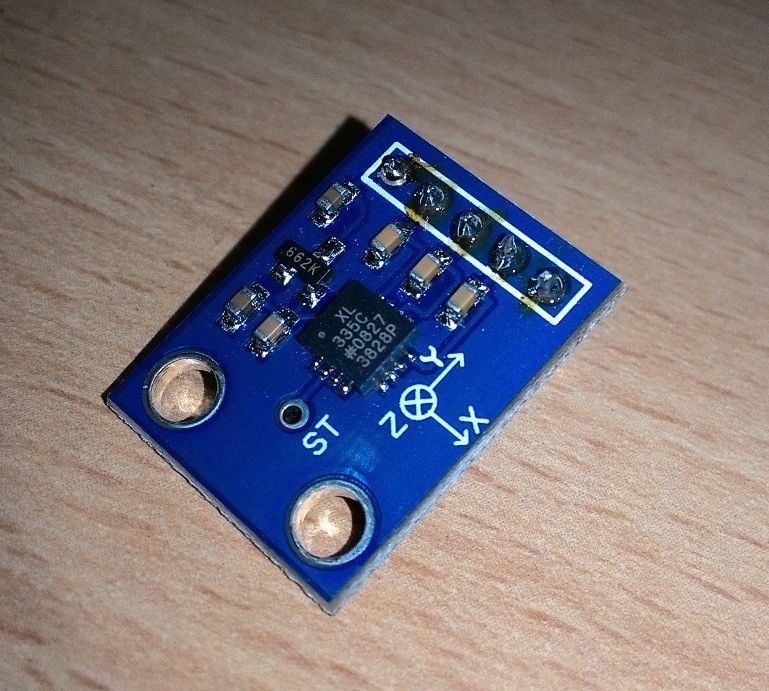
Dedo índice háptico controlado a través de sensores MEMS
El tacto háptico se usa para sentir el mundo sosteniendo herramientas. Este proyecto implementa un robot detectado por el dedo índice utilizado para personas discapacitadas para que puedan seguir la dirección del índice.
La trayectoria del robot puede ser continua, de lo contrario, de punto a punto. El sensor utilizado en este robot detecta principalmente la dirección del dedo índice y genera la salida. Esta salida se puede transmitir utilizando el transmisor de RF hacia la unidad receptora de RF.
En el receptor de RF, el receptor recibe la señal para ordenar al microcontrolador para que el robot pueda moverse en una dirección específica. Este sistema utiliza tecnología RF, sensor MEMS y microcontrolador. El robot obtiene los comandos mediante el sensor MEMS. En la sección del transmisor, este sensor se puede colocar en el dedo índice.
Diseño de vehículos no tripulados mediante microcontrolador
Este proyecto implementa un vehículo no tripulado con la ayuda de un microcontrolador y una red GSM. Este proyecto reemplaza el control remoto de RF que utiliza la red GSM ya que experimenta diferentes desventajas, como el rango de frecuencia es limitado y el control limitado.
Implementación del robot de topografía
Este proyecto diseña un robot que utiliza un microcontrolador, a saber, un robot topográfico. Este robot está especialmente diseñado para calcular la región de la tierra y dividirla en diferentes parcelas. Este proyecto incluye dos partes como el robot topográfico y el módulo de medición para el área. El control de este robot se puede realizar mediante el módulo ZigBee para que el robot pueda moverse en toda la parcela.
El cálculo de la distancia de viaje del robot se puede realizar utilizando el concepto de temporizador. Este valor de distancia se puede enviar a la PC. En este sistema, la segunda parte involucra el módulo de medición de región. Este módulo puede diseñarse con lenguaje C integrado para permitir al usuario decidir de manera eficiente la región de la parcela.
Robot para pintar paredes
El concepto principal de este proyecto es implementar un robot de pintura mural. Este robot ayuda a lograr equipos de pintura de bajo costo. La razón principal para diseñar este robot es que los productos químicos en la pintura de la pared pueden causar problemas de salud a los pintores humanos, como problemas de infección en los ojos y la garganta.
La pintura a mano consume mucho tiempo debido al trabajo repetido. Una vez que los robots y los trabajadores de la construcción se incluyan correctamente en las tareas de construcción, todo el procedimiento de construcción se puede gestionar de mejor manera reduciendo la mano de obra.Además, resolvería la mayoría de los problemas relacionados con la seguridad siempre que se produzcan varias actividades a la vez.
Robot de escalada de pared
La función principal de este robot es diseñar y desarrollar un robot para escalar paredes para limpiar una sola ventana grande. Este robot se adhiere a la superficie del vidrio mediante una ventosa. Este robot limpia la ventana con un limpiador que está conectado al robot en la parte frontal. Una vez que se limpia la ventana, el robot dejará de limpiar según las instrucciones dadas por el microcontrolador.
Para la adhesión del robot al exterior, existen diferentes métodos disponibles como el uso de fuerza magnética, micro espina, etc. Sin embargo, aquí desarrollamos Elecrochuks en este sistema para lograr la adhesión del robot. Las dimensiones de este robot son alrededor de 690 mm veces mientras que su peso es de alrededor de 3 kg por debajo.
Robot 4 en 1 con microcontrolador
Este proyecto implementa un robot cuatro en uno basado en microcontroladores que funciona en cuatro modos, como detección de borde, seguimiento de línea, buscador de caminos y detección de obstáculos. Este proyecto se puede construir con el microcontrolador ATMEGA168 para lograr el objetivo usando los interruptores, sensores y LED.
Herramienta de energía solar con microcontrolador y brazo robótico
Los acuerdos de robots a través de máquinas automatizadas que pueden tomar el lugar de los humanos implican que se parecen a los humanos. El brazo de un robot es un tipo de dispositivo mecánico que generalmente se programa con las mismas funciones de un brazo humano. Sabemos que la energía solar es una luz brillante además del calor que genera el sol. El sistema propuesto se utiliza para diseñar un robot que se pueda alimentar mediante energía solar a través de los brazos de un robot para recoger y colocar un objeto.
En el sistema propuesto, se diseñó principalmente el vehículo robótico que funciona con energía solar. Se utiliza principalmente para aumentar la potencia de los vehículos que utilizan energía solar. En este proyecto, el brazo robótico está diseñado para manejar el vehículo para recoger y colocar un objeto. La carga de vehículos se puede realizar mediante dos métodos, como el uso de la fuente de alimentación directa y otro es el seguimiento de la energía solar. Por lo tanto, el robot puede utilizar toda la energía solar para poder realizar la operación requerida.
Análisis y control de robots móviles para la inspección de tuberías
Este proyecto diseña un robot que se utiliza para la inspección de tuberías. Este robot se puede diseñar a través de los sensores. En este proyecto, el análisis de la aceleración y la velocidad del método de cuatro barras se utiliza para controlar el robot. Este robot utiliza un microcontrol 8051 que incluye dos secciones como el transmisor y el receptor.
El transmisor incluye cuatro interruptores para proporcionar cuatro órdenes, mientras que el receptor está conectado a GSM para operar el robot móvil una vez que recibe el comando, envía el mensaje una vez que el robot detecta cualquier obstáculo. En el receptor, incluye un sensor de infrarrojos que funciona a través de GSM para detectar un obstáculo. El GSM ayudará a diseñar capacidades interactivas de modo que se reduzca el tiempo necesario para encontrar el problema.
Sistema de control para silla de ruedas eléctrica mediante ojos
Este proyecto se utiliza para implementar un sistema de control para una silla de ruedas eléctrica mediante ojos. El control de este sistema propuesto se puede realizar únicamente a través de los ojos. Por lo tanto, las personas con discapacidades físicas pueden controlar una silla de ruedas eléctrica por sí mismas. Al utilizar este proyecto, el sistema propuesto es fuerte contra los factores de potencia antes mencionados. Además, se establece que este proyecto se puede controlar a través del ojo humano de forma segura y precisa.
Robot de servicio a través de RFID
Este proyecto diseña un robot de servicio con la ayuda de RFID. Este tipo de robot se utiliza para mejorar la eficiencia del servicio de alimentos a los clientes dentro de los restaurantes y hoteles al reducir el tiempo de espera. En este proyecto, la operación requerida se puede realizar con la ayuda de un microcontrolador PIC así como con tecnología RFID.
Land Rover operado por teléfono celular
Este proyecto implementa un robot Land Rover donde el control del robot se puede realizar utilizando tres fases diferentes como percepción, acción y procesamiento. En general, los preceptores no son más que sensores que están dispuestos en el robot y el procesamiento se puede realizar a través del microcontrolador. La tarea se puede realizar con la ayuda de motores o actuadores.
El robot de este proyecto se puede controlar por teléfono haciendo una llamada al teléfono que está conectado al vehículo robótico. El tono del móvil que coincide con un botón se puede escuchar al final del procesamiento. El robot land rover reconoce este tono DTMF usando el teléfono apilado dentro del robot
Robot controlado por Bluetooth
Este proyecto implementa un robot que se controla a través de Bluetooth. Estos robots se pueden operar a través de las señales que se transmiten desde un teléfono Android junto con la comunicación Bluetooth. Los principales componentes utilizados en este proyecto son el microcontrolador, el motor de CC y el módulo Bluetooth. La conexión entre el sistema y el usuario se puede establecer a través del dispositivo Bluetooth siempre que se utilice un microcontrolador para el procesamiento de la señal. Las aplicaciones de estos robots incluyen desde vehículos remotos hasta misiones no tripuladas.
Robot controlado a través de Wi-Fi y microcontrolador
Hoy en día, el WiFi se ha convertido en una parte esencial de nuestra vida diaria y los diferentes dispositivos que están conectados a Internet aumentarán debido al desarrollo dentro de la tecnología. En este proyecto, el proceso de integración se puede realizar utilizando un sistema integrado además de Internet.
Este robot se puede operar a través de un sitio web o computadora con la ayuda de Wi-Fi como el módulo de comunicación. Este módulo debe utilizarse para establecer una conexión entre el usuario y el robot. Los componentes esenciales utilizados para construir este proyecto son microcontroladores, módulos Wi-Fi como ESP8266 y motores DC.
Robot recolector de basura de agua con energía solar
Este proyecto implementa un robot innovador para recolectar agua basura utilizando energía solar. La intención principal de este proyecto es limpiar la basura que se puede recolectar en la superficie de los cuerpos de agua. Este proyecto ayuda a limpiar el agua para reducir la contaminación.
Este proyecto se puede controlar a través de un control remoto RC. Este proyecto utiliza bombas de CC para proporcionar el control de dirección y disposición del servomotor para la navegación. Aquí, se implementan dos paneles solares para hacer que el robot sea autosostenible en el agua. Estos paneles ayudan a cargar la batería y la recolección de basura se puede hacer usando un calibre de cable.
Vigilancia de la vida silvestre mediante robot de RF
Este proyecto diseña un robot para la vigilancia de la vida silvestre mediante RF. Al utilizar este proyecto, el operador no necesita acercarse a los animales salvajes para tomar las imágenes muy de cerca. Aquí, el robot se utiliza para observar la vida salvaje de los animales utilizando el sistema de visión nocturna utilizando una cámara de visión nocturna en el robot. Este robot se puede controlar de forma inalámbrica mediante un mando a distancia de RF. El video que se graba se puede almacenar en la PC para ver a los animales.
Este sistema utiliza una unidad de microcontrolador 8051 para recibir señales del transmisor de RF para su posterior proceso. Estas señales se pueden transmitir al receptor de RF para que el microcontrolador procese estos datos para impulsar los motores. Para que los vehículos robotizados puedan funcionar. Una vez que el microcontrolador recibe la señal para cambiar la dirección de la cámara, entonces se envía al motor para alcanzar el ángulo preferido de la cámara. Por lo tanto, la observación de la vida silvestre se puede realizar utilizando un robot a través de una cámara de visión nocturna para obtener una vista más cercana de los animales usando un control remoto de RF.
Algunas ideas de proyectos de robótica más basadas en microcontroladores incluyen las siguientes.
- Brazo robótico Pick-N- Place y el movimiento controlado por Android de forma inalámbrica
- Vehículo robótico controlado por voz con reconocimiento de voz de larga distancia
- Robot de espionaje War Field con cámara inalámbrica de visión nocturna por aplicaciones de Android
- La decodificación de código Manchester controla la dirección de los robots mediante el control remoto de TV
- Robótica de control y detección de incendios
- Control de brazo robótico a través de Internet LAN para operación del paciente
- Robot de extinción de incendios operado de forma remota por aplicaciones de Android
- Robot de espionaje War Field con cámara inalámbrica de visión nocturna
- Vehículo robótico contra incendios
- Pick-N-Place con una pinza de agarre suave
- Vehículo robótico detector de metales
- Vehículo robótico controlado por teléfono celular
- Vehículo robótico de seguimiento de línea Usando microcontrolador
- Vehículo robótico controlado por infrarrojos
- Vehículo robótico con control remoto basado en pantalla táctil para la gestión de tiendas
- Auto Metro Tren para transporte entre estaciones
- Vehículo robótico para evitar obstáculos
- Vehículo robótico controlado por RF con gestión de haz láser
Proyectos de robótica para estudiantes de ingeniería
En los últimos años, muchos estudiantes de ingeniería han comenzado a mostrar mucho interés en proyectos robóticos en comparación con otros proyectos. Robots como pick-n-place, seguimiento de línea , wall track y proyectos de robótica que utilizan microcontroladores son proyectos populares a nivel académico. La siguiente lista de proyectos robóticos basados en microcontroladores y proyectos robóticos para estudiantes de ingeniería es muy útil para los estudiantes. Aparte de esto, hay algunos dispositivos electrónicos. proyectos de ingeniería sobre aplicaciones robóticas.

Proyectos de robótica para estudiantes de ingeniería
- Robot de detección y alerta humana en vivo
- Robot inalámbrico controlado por PC
- Robot de control remoto basado en RF con cámara de video inalámbrica montada en él
- Robot autónomo con visión artificial para la detección de obstáculos
- Ambientador inalámbrico Rociador Robot con Video Vision
- Robot simple de elegir y colocar
- Robot inteligente controlado por pantalla táctil
- Interfaz humano-robot que utiliza un sólido reconocimiento de voz
- Robot de detección de humo y gas LPG con control inalámbrico
- Robot multipropósito inalámbrico controlado por PC
- Robot de reconocimiento de voz con una indicación de sensor de fuego
- Robot de control remoto con sensor de incendios
- Brazo robótico interconectado con MCU / RF / IR / PC
- Robot pulverizador de velocidad
- Robot de seguimiento de paneles solares
Proyectos de robótica simples para principiantes
Para los principiantes, es mejor ir por proyectos robóticos simples para aprender conceptos y técnicas básicos que los desafiarán a enfrentarse a la robótica grande y compleja a medida que se acostumbren a practicarla.

Proyectos de robótica simple
- Robot controlado por móvil usando GSM
- Robot evitador de bordes
- Robot de seguimiento de luz
- Un simple robot que sigue una línea
- Robot seguidor de pared
- Robot de detección de bombas
- Robot de energía solar de BASURA
- Robot borracho de bolsillo
- Virbobot cucaracha solar
- Blinky the LED Pet
- Modelo de papel robótico intratable
Proyectos de Robot Arduino
Arduino es un microcontrolador de placa única y su hardware consiste en una placa de hardware de código abierto. Esta placa de hardware está diseñada con un Atmel de 8 bits Microcontrolador AVR , o un Atmel ARM de 32 bits. Arduino está diseñado para brindar una manera fácil de programar objetos interactivos. Aquí hemos mencionado una lista de proyectos de robótica basados en microcontroladores como un Arduino.

Proyectos de Robot Arduino
- Controle un brazo robótico OWI con Arduino
- DFRobotshop Rover o Arduino en pistas
- Robot Arduino controlado por voz
- Microbot basado en Arduino Nano
- Coche RC de ingeniería inversa para hacer un Rover Arduino
- 2WD amplía la plataforma Arduino Robot Chasis Smart Car Chasis
- Kits de chasis de coche inteligente Arduino Robot 4WD con codificador de velocidad
- El truco de la araña Hexbug
- Stompy el Robot Caminante
- Arduino Bot Proto
- Robot Arduino para probar Whiley
- Robot de autoequilibrio de 2 ruedas mediante Arduino y MPU6050
Proyectos de Ingeniería Electrónica
En nuestra vida diaria, la electrónica juega un papel importante. Entonces, si aprendemos algunas cosas básicas sobre electrónica, es favorable para nosotros. Estos proyectos electrónicos tratan con varios circuitos que pueden incluir conceptos como condensadores, diodos, circuitos integrados, etc. Muchas personas están mostrando interés en varias ramas de la ingeniería de la electrónica. Después de realizar algunos proyectos en la rama de ingeniería de la electrónica, podemos adquirir conocimientos prácticos de electrónica. Para aquellos que estén interesados en proyectos de electrónica, la siguiente lista de proyectos e ideas de ingeniería electrónica Sería útil.
- Automatización del hogar basada en Arduino
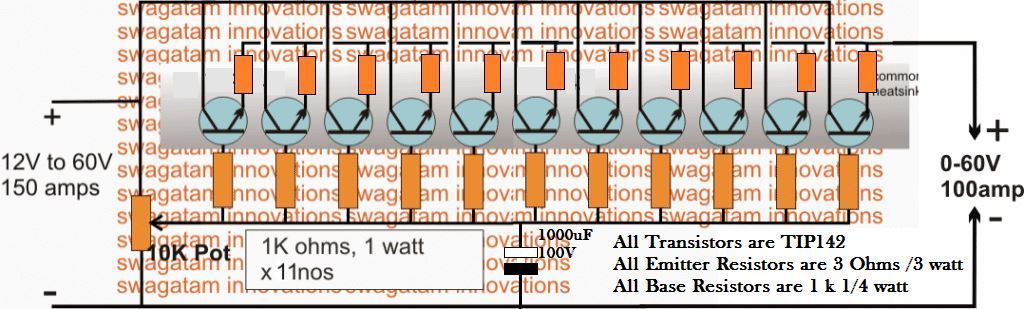
- Transferencia de energía inalámbrica en el espacio 3D
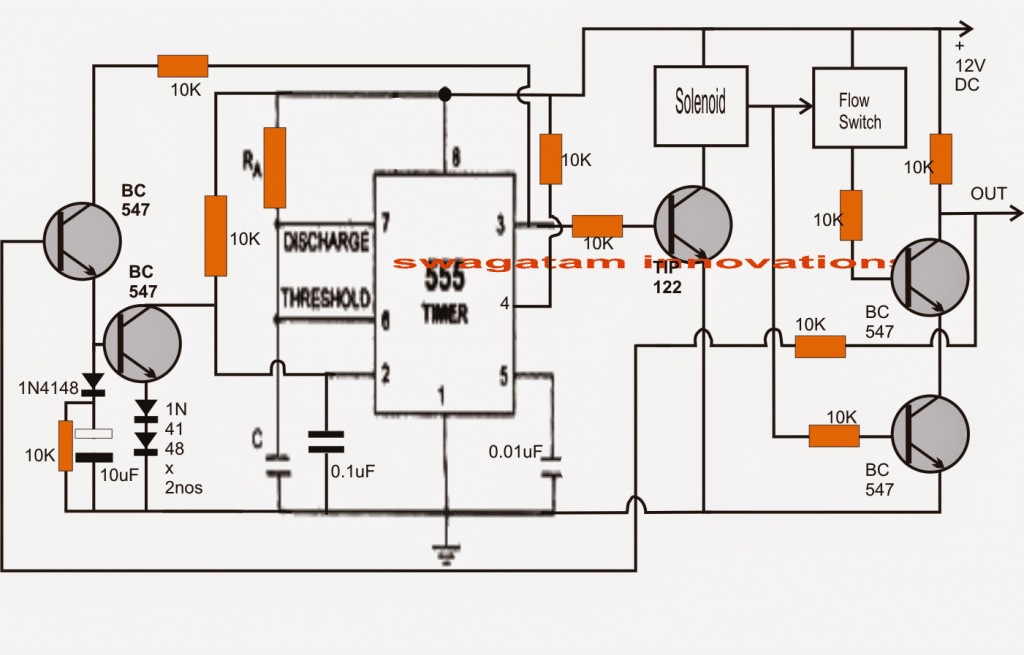
- Controlador de bomba de líquido industrial con ranuras de tiempo definidas por el usuario basadas en temporizador
- Control automático de intensidad de luces de calle basado en Arduino
- CC de alto voltaje según los principios del generador de Marx
- Sistema de seguridad electrónico controlado por los ojos
- De largo alcance Transmisor FM con modulación de audio
- Carga operada por relé basada en retardo de tiempo
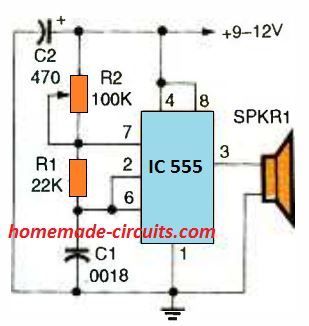
- Aumente de 6 V CC a 10 V CC con el temporizador 555
- Comprobador de secuencia de fases para suministro trifásico
- Detector de fuego o humo con sistema automático de rociadores de agua
- Sistema de encendido y apagado de bomba basado en GSM / GPRS
- Sistema IVRS controlado por teléfono móvil
- Sistema automático de control de alumbrado público usando LDR de alta sensibilidad
- Regulación automática de velocidad según el vehículo entrante en vías altas
- Aplicaciones de robots
- Las aplicaciones de robot se pueden clasificar en dos tipos: aplicaciones actuales y aplicaciones futuras.
- Las aplicaciones actuales incluyen:
- Transferencia de material, carga y descarga de máquinas
- Operaciones de procesamiento
- Montaje e inspección
- Las aplicaciones futuras incluyen:
- Médico
- -Artillería militar, carga, vigilancia
- Aplicaciones para el hogar
- Industria electrónica
- Taller de máquinas totalmente automatizado
Esto se trata de la lista de proyectos sobre robótica, como Proyectos de robótica basados en microcontroladores rentables, proyectos robóticos simples, proyectos robóticos Arduino y proyectos robóticos para estudiantes de ingeniería. Esperamos que tenga una mejor comprensión y concepto de los proyectos de robótica basados en microcontroladores. Comparta sus puntos de vista sobre este artículo en la sección de comentarios a continuación, y si necesita más ayuda para implementar estos proyectos, puede contactarnos.
Créditos fotográficos:
- Proyectos de robótica usando microcontrolador por daihen-usa
- Robots industriales de linksic
- Proyectos de robótica para estudiantes de ingeniería por electronica
- Proyectos de robótica simple de nootrix
- Proyectos de robot Arduino por rlocman








{kind=link}