La publicación explica un circuito controlador de motor controlado por láser de línea simple, que funciona respondiendo a una línea láser horizontal de precisión, generada a partir de un dispositivo de nivel láser de línea, y ajusta automáticamente la alineación de la herramienta conectada o el trabajo de trabajo con extrema perfección y precisión.
¿Qué es el láser de línea?
El equipo láser de línea es un reemplazo electrónico de alta precisión del antiguo alineador de nivel de burbuja de los carpinteros.
El dispositivo láser de línea es en realidad un equipo emisor de láser avanzado que puede generar 360 ° Línea láser horizontal iluminada de alta precisión, para proporcionar una referencia de calibración a todos los trabajos de ingeniería industrial o de la construcción, de modo que el resultado final del trabajo sea perfectamente recto y alineado sin el más mínimo error.
El circuito fue solicitado por uno de los lectores dedicados de este blog, el Sr. Rafal.
Las discusiones detalladas sobre el procedimiento de trabajo del motor controlado por láser de línea se pueden aprender en los siguientes párrafos:
Objetivo de diseño
Señor. Rafal: Soy muy nuevo en esto. He investigado un poco en las últimas semanas y no he encontrado exactamente lo que necesito.
Estaré agradecido por cualquier ayuda. Adjunto foto de mi idea. Quiero controlar dos motores de 12 V CC con un nivel láser.
El nivel de láser de línea señalará a los receptores.

Esta señal tendrá que controlar la dirección del motor de 12 V CC. El motor hace girar la varilla roscada hacia adelante y hacia atrás para ajustar la altura de la herramienta.
Por lo que descubrí, habría varios fotodiodos conectados en paralelo, uno para detectar el láser por encima del nivel cero y el otro por debajo de ese nivel. El nivel nulo es solo una especie de pausa entre los fotodiodos para evitar que el sistema se active. Sensor láser sin display. Solo le di una foto pictórica.
Necesito un circuito de puente H, pero todos los que encontré deben usarse con un sistema Arduino. Si es necesario, puedo comprar un puente ya hecho por un precio razonable de hasta $ 30
Idealmente, esto funcionaría con láseres rojo y verde, pero las longitudes de onda son tan diferentes que dudo que se pueda hacer y no funcionaría en todo el espectro de luz.
Inicialmente, me gustaría establecer el nivel de esta viga conectada a los motores con los botones de arriba hacia abajo. Me encantaría si el segundo motor se nivelara con el giroscopio mientras lo configuraba, pero sin el Arduino podría ser muy difícil.
Siento que lo que estoy tratando de hacer es tan simple que puedo escapar sin usar Arduino. E insisto en un analógico, debido a las difíciles condiciones en un sitio de construcción y me parece que cuanto más electrónica, menos confiable es el dispositivo.
Solo funcionará en interiores y la distancia del láser es de 10 m como máximo. El motor que encontré al principio tiene un gran consumo de corriente de 200 mA máx. 2,19 A, pero también un gran par.
Alimente 18 V CC con una batería Makita.
Gracias de antemano por cualquier sugerencia.
Saludos desde Polonia
Rafal
Estilo : Tengo una confusión sobre el funcionamiento de los ejes del motor. ¿El tornillo roscado de ambos motores empujará la herramienta, pero no puede tirar de ella hacia atrás? ¿Cómo funciona eso?
¿Es posible implementar lo mismo con un solo motor?
Señor. Rafal: Las reglas de nivelación inferiores serían quizás de 70 cm, solo para habitaciones pequeñas, p. Ej. un baño para poder entrar por una puerta.
Máquina sin motor, tirada a mano, solo reglas de nivelación. En el video, los dos objetos amarillos en los mástiles son detectores láser unidos rígidamente a las reglas.
El láser está en algún lugar más alejado y produce una línea horizontal.
Los motores se conectarían a un carro y el tornillo roscado a las reglas de nivelación con detectores láser. Debe haber dos motores para nivelar ambos lados, pero es una imagen especular.
La única parte común sería un puente en H de dos canales como si lo estuviera haciendo desde un módulo prefabricado y posiblemente un giroscopio, pero eso es un sueño :).
Es importante que haya un botón para las revoluciones de los motores izquierdo y derecho.
El procedimiento es este. Cuelgo el láser, por ejemplo, 2 m por encima del nivel del suelo designado. Mido 2 metros desde el rayo láser hasta el borde inferior de las reglas.
Regulo la altura presionando los botones de los interruptores derecha-izquierda para que sea igual a 2 metros hasta el borde inferior de las reglas. Coloco los detectores en los mástiles para que el rayo láser esté a nivel cero entre las secciones del fotodiodo. Y el resto lo hará solo
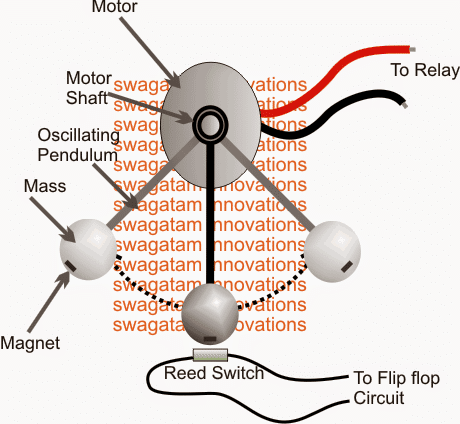
En el adjunto pongo un dibujo del funcionamiento del detector.
Rafal
Diseño de circuito

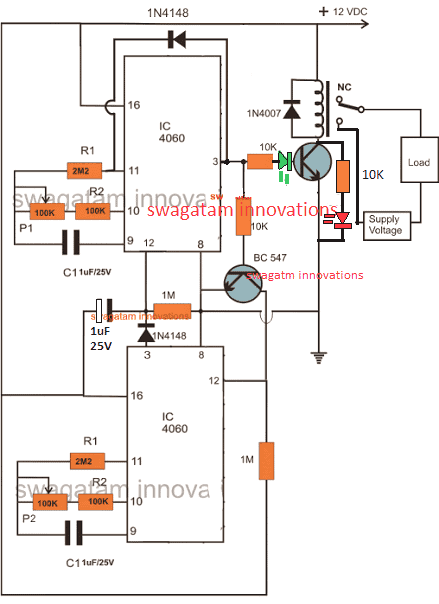
Al observar la figura anterior, se requerirán dos etapas de circuito idénticas para detectar y corregir la herramienta controlada por motor asociada con respecto a la precisión de la rectitud de la línea láser.
Las dos etapas idénticas son imágenes especulares entre sí, como se muestra a continuación:

El circuito es bastante sencillo. Funciona con un comparador de ventana que garantiza que los motores de accionamiento no funcionen siempre que el par de LDR estén expuestos con el mismo brillo de línea láser.
A continuación, se genera la mitad de la tensión de alimentación en la entrada no inversora de A1 y en la entrada inversora de A2.
Tan pronto como se detecta una desviación en la línea láser (lo que puede suceder si la herramienta controlada por motor no está alineada en línea recta), el brillo que afecta a los LDR R1 y R2 cambia.
En esta situación, el voltaje de entrada al comparador de ventana se aleja de la mitad del voltaje de suministro. Esta situación hace que la salida del comparador ordene a la red del puente de motor que mueva el motor en sentido horario o antihorario.
Transistores T1. . . T4 están configurados como una red puente para permitir la conmutación del motor en direcciones de avance y retroceso dependiendo de la iluminación LDR o del ángulo de desviación de la línea láser.
Diodos D1. . . D4 están posicionados para cancelar los picos de voltaje generados durante el tiempo que el motor está activo y funcionando. La función de los potenciómetros preajustados P1 y P2 es facilitar los ajustes de alineación.
Estos se ajustan para garantizar que el motor esté completamente apagado e inactivo siempre que el par LDR relevante esté expuesto exactamente al mismo brillo de luz láser.
Digamos, por ejemplo, que debido a una alineación incorrecta de la herramienta controlada por motor, la inclinación de la línea láser hace que la luz se reduzca en LDR R2 que en LDR R1. Esto dará como resultado que el voltaje en el punto A se eleve por encima de la mitad del voltaje de suministro.
En esta situación, la salida del amplificador operacional A1 se vuelve alta, lo que obliga a operar los transistores T1 y T4. Esto, a su vez, hace que el motor gire en la dirección correspondiente. Esta acción desplaza automáticamente la herramienta conectada en línea recta hasta que su precisión de alineación horizontal coincide con la precisión de la línea láser.
Por el contrario, si asumimos que la herramienta está inclinada con la orientación opuesta de manera que la iluminación de los LDR sea opuesta a la discutida anteriormente, hace que el voltaje en el punto A caiga por debajo de la mitad del voltaje de suministro. Esta condición hace que el amplificador operacional de salida A2 suba de modo que T3 y T2 entren en funcionamiento.
Esto da como resultado que el motor funcione ahora en la dirección opuesta, en un intento de corregir la alineación de la herramienta en la dirección relevante hasta que se vuelva perfectamente recta coincidiendo con la precisión horizontal de la línea láser.
Botón arriba / abajo
Los botones de subida y bajada para preajustar inicialmente la altura del nivel de burbuja pueden implementarse simplemente conectando interruptores de botón en paralelo a cada uno de los LDR.
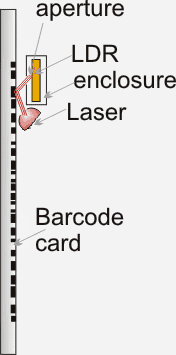
Instalación de LDR
Para obtener la respuesta correcta de los LDR, los pares de izquierda a derecha deben instalarse dentro de un gabinete similar a un tubo de manera que puedan 'ver' solo la iluminación láser y no ninguna otra luz ambiental.
La idea se puede ver en la siguiente imagen:

Aquí, podemos ver que los LDR están colocados muy cerca uno del otro, lo que asegura que cuando la línea láser está en el centro exacto, una parte de los dos pares LDR se iluminan uniformemente con la luz láser.
El frente de la caja del LDR podría cubrirse con una lente difusa, de modo que la iluminación láser pudiera difundirse en el interior sobre los respectivos LDR de manera uniforme.
Artículo anterior: Circuito de alarma antirrobo simple para proteger artículos valiosos Siguiente: Circuito probador universal BJT, JFET, MOSFET