El artículo presenta un diseño de circuito de scooter eléctrico simple que también se puede modificar para hacer un auto-rickshaw eléctrico. La idea fue solicitada por el Sr. Steve.
La solicitud de circuito
Tuve la suerte de encontrar tu blog, cosas realmente increíbles que has logrado diseñar.
Estoy buscando DC a DC Step Up y controlador para motor de scooter eléctrico
Entrada: SLA (plomo-ácido sellado) Batería 12V, que tiene ~ 13.5V cargada
voltaje mínimo - cortado a ~ 10.5V
Salida: motor 60V DC 1000W.
¿Te has encontrado con un circuito como ese?
Puedo imaginar que será del tipo push-pull, pero no tengo idea de los tipos de mosfets (dé el vataje 80-100A), impulsándolos, luego el transformador, el tipo de núcleo y luego los diodos.
Más el voltaje mínimo cortado para limitar el ciclo de trabajo del PWM.
He encontrado más información. El motor es trifásico sin escobillas con sensores Hall.
Hay dos formas de abordarlo, a / dejar el controlador existente en su lugar y solo aumentar de 12V a 60V ob / reemplazar el controlador también.
No habrá ninguna diferencia en la eficiencia energética, el controlador simplemente cambia qué fase recibe corriente en función de los sensores de pasillo. Por lo tanto, seguir con el plan a.
Muchísimas gracias,
Steve

El diseño
Hoy en día, fabricar un vehículo eléctrico es mucho más fácil de lo que solía ser antes, y esto ha sido posible gracias a dos elementos principales en el diseño, a saber, los motores BLDC y las baterías de iones de litio o de polímero de litio.
Estos dos miembros ultraeficientes han permitido fundamentalmente que el concepto de vehículo eléctrico se convierta en una realidad y sea prácticamente factible.
Por qué BLDC Motor
El motor BLDC o el motor sin escobillas es eficiente porque está diseñado para funcionar sin contactos físicos, excepto los rodamientos de bolas del eje.
En los motores BLDC, el rotor gira únicamente a través de la fuerza magnética, lo que hace que el sistema sea extremadamente eficiente, a diferencia de los motores cepillados anteriores, que tenían sus rotores unidos a la fuente de suministro a través de cepillos, lo que provocaba mucha fricción, chispas y desgaste en el sistema.
Por qué la batería de iones de litio
De manera similar, con el advenimiento de las baterías de iones de litio muy mejoradas y las baterías Lipo, hoy en día, lograr electricidad a partir de baterías ya no se considera un concepto ineficiente.
Anteriormente solo teníamos baterías de plomo-ácido a nuestra disposición para todos los sistemas de respaldo de CC, lo que planteaba dos inconvenientes importantes: estas contrapartes necesitaban mucho tiempo para cargarse, tenían una tasa de descarga restringida, una vida útil más baja y eran voluminosas y pesadas, todo esto solo agregaba a su naturaleza ineficiente de trabajar.
En oposición a esto, los bloques de Li-ion o Li-po son más livianos, compactos, se pueden cargar rápidamente a altas tasas de corriente y se pueden descargar a cualquier tasa de corriente alta deseada, estos tienen una mayor vida útil, son del tipo SMF, todas estas características los convierten en los candidato adecuado para aplicaciones como scooters eléctricos, rickshaws eléctricos, quadcopter drones etc.
Aunque los motores BLDC son extremadamente eficientes, estos requieren circuitos integrados especializados para accionar sus bobinas de estator, hoy tenemos muchos fabricantes que producen estos módulos de circuito integrado exclusivos de próxima generación que no solo realizan la función básica de operar estos motores, sino que también se especifican con muchos módulos adicionales avanzados. características, tales como: control de bucle abierto PWM, control de bucle cerrado asistido por sensor, múltiples salvaguardas infalibles, control de avance / retroceso del motor, control de frenado y una multitud de otras características integradas de última generación.
Uso de un circuito de controlador BLDC
Ya hablé de uno de estos excelentes chips en mi publicación anterior, diseñado específicamente para manejar motores BLDC de alto voltaje, es el MC33035 IC de Motorola.
Aprendamos cómo este módulo se puede implementar de manera efectiva para hacer un scooter eléctrico o un rickshaw eléctrico, directamente en su hogar.
No discutiré los detalles mecánicos del vehículo, sino solo el circuito eléctrico y los detalles del cableado del sistema.
Diagrama de circuito

Lista de partes
Todas las resistencias incluyen Rt pero excluyen Rs y R = 4k7, 1/4 vatios
Ct = 10 nF
Potenciómetro de velocidad = 10K lineal
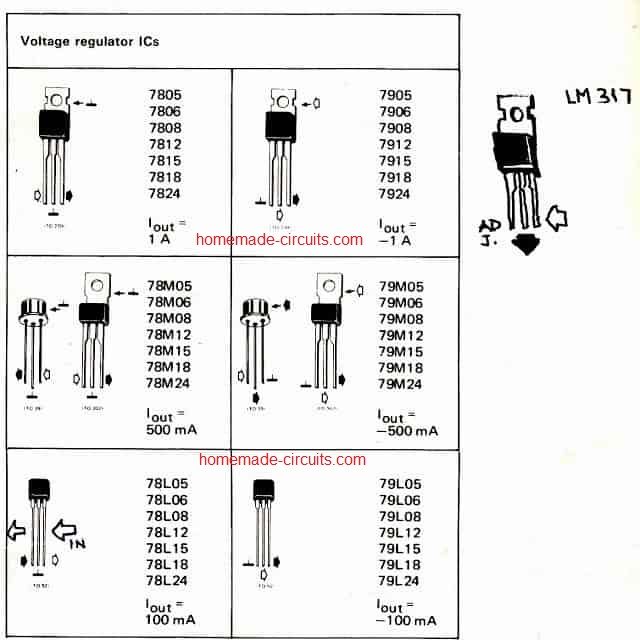
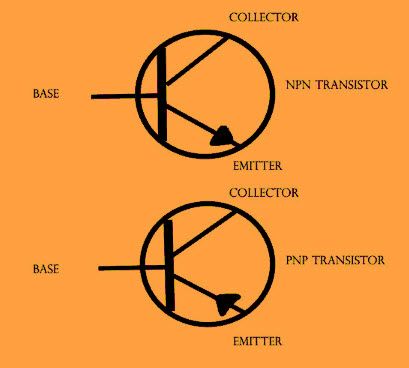
BJT de potencia superior = TIP147
Mosfets inferiores = IRF540
Rs = 0,1 / capacidad máxima de corriente del estator
R = 1 K
C = 0,1 uF
La figura anterior muestra un controlador de motor de CC trifásico sin escobillas de alto vataje IC MC33035 que se vuelve perfectamente adecuado para la aplicación propuesta de scooter eléctrico o rickshaw eléctrico.
El dispositivo tiene todas las características básicas que se pueden esperar de estos vehículos y, si es necesario, el IC podría mejorarse con características avanzadas adicionales a través de muchas configuraciones alternativas posibles.
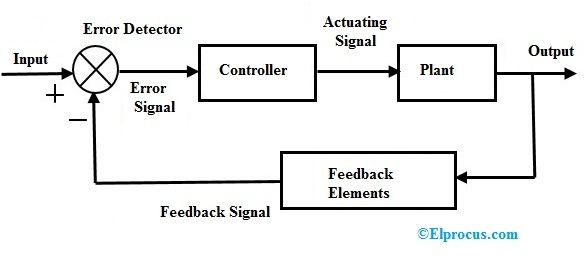
Las características avanzadas se vuelven específicamente posibles cuando el chip se configura en un modo de bucle cerrado, sin embargo, la aplicación discutida es una configuración de bucle abierto, que es una configuración más preferida ya que es mucho más sencilla de configurar y, sin embargo, es capaz de cumplir con todas las características requeridas. que se puede esperar en un vehículo eléctrico.
Ya hemos discutido las funciones de pinout de este chip En el capítulo anterior, resumamos lo mismo y también comprendamos cómo exactamente se puede requerir que se implemente el IC anterior para lograr las diversas operaciones involucradas en un vehículo eléctrico.
Cómo funciona el IC
La sección sombreada en verde es el MC 33035 IC en sí mismo, que muestra todos los circuitos sofisticados incorporados incrustados dentro del chip y lo que lo hace tan avanzado con su rendimiento.
La parte sombreada en amarillo es el motor, que incluye un estator trifásico indicado por las tres bobinas en la configuración 'Delta', el rotor circular indicado con los imanes de polos N / S y tres sensores de efecto Hall en la parte superior.
Las señales de los tres sensores de efecto Hall se alimentan a los pines 4, 5, 6 del IC para el procesamiento interno y la generación de la secuencia de conmutación de salida correspondiente a través de los dispositivos de potencia de salida conectados.
Funciones de pinout y controles
Los pines 2, 1 y 24 controlan los dispositivos de potencia superiores configurados externamente mientras que los pines 19, 20, 21 están asignados para controlar los dispositivos de potencia complementarios de la serie inferior. que en conjunto controlan el motor automotriz BLDC conectado según los diversos comandos alimentados.
Dado que el IC está configurado en un modo de bucle abierto, se supone que debe activarse y controlarse mediante señales PWM externas, cuyo ciclo de trabajo se supone que determina la velocidad del motor.
Sin embargo, este IC inteligente no requiere un circuito externo para generar los PWM, sino que se maneja mediante un oscilador incorporado y un par de circuitos de amplificador de error.
Los componentes Rt y Ct se seleccionan apropiadamente para generar la frecuencia (20 a 30 kHz) para los PWM, que se alimenta al pin # 10 del IC para su posterior procesamiento.
Lo anterior se hace a través de un voltaje de suministro de 5V generado por el propio IC en el pin # 8, este suministro se usa simultáneamente para alimentar los dispositivos de efecto Hall, parece que todo se hace precisamente aquí ... nada se desperdicia.
La parte sombreada en rojo forma la sección de control de velocidad de la configuración, como se puede ver, simplemente se hace usando un solo potenciómetro ordinario ... empujarlo hacia arriba aumenta la velocidad y viceversa. Esto, a su vez, es posible gracias a los ciclos de trabajo de PWM que varían correspondientemente en pin # 10, 11, 12, 13 .
El potenciómetro se puede convertir en un circuito de montaje LDR / LED, para lograr un control de velocidad del pedal sin fricción en el vehículo.
Pin # 3 es para determinar la dirección de avance, retroceso de la rotación del motor, o más bien la dirección del scooter o del rickshaw. Implica que ahora su scooter eléctrico o su rickshaw eléctrico tendrán la facilidad de retroceder ... imagínense un vehículo de dos ruedas con un mecanismo de retroceso, ... ¿interesante?
Pin # 3 se puede ver con un interruptor, cerrar este interruptor hace que el pin n. ° 3 se conecte a tierra, lo que permite un movimiento 'hacia adelante' hacia el motor, mientras que al abrirlo hace que el motor gire en la dirección opuesta (el pin 3 tiene una resistencia de extracción interna, por lo que la el interruptor no causa nada perjudicial para el IC).
Idénticamente, el interruptor de la clavija n. ° 22 selecciona la respuesta de la señal de cambio de fase del motor conectado, este interruptor debe encenderse o apagarse adecuadamente con referencia a las especificaciones del motor, si se usa un motor en fase de 60 grados, entonces el interruptor debe permanecer cerrado y abierto para un motor en fase de 120 grados.
Pin # 16 es el pin de tierra del IC y debe conectarse con la línea negativa de la batería y / o la línea de tierra común asociada con el sistema.
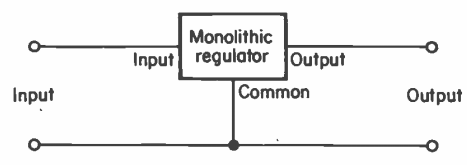
Pin # 17 es el Vcc, o el pin de entrada positivo, este pin debe estar conectado a un voltaje de suministro entre 10 V y 30 V, siendo 10 V el valor mínimo y 30 V el límite máximo de ruptura para el IC.
Pin # 17 puede integrarse con 'Vm' o la línea de suministro del motor si las especificaciones de suministro del motor coinciden con las especificaciones de IC Vcc; de lo contrario, el pin 17 podría suministrarse desde una etapa de regulador reductor independiente.
Pin # 7 es el pinout de 'habilitación' del IC, este pin puede verse terminado a tierra a través de un interruptor, mientras esté encendido y el pin # 7 permanezca conectado a tierra, el motor puede permanecer activado, cuando se apaga, el motor se desactiva y el motor gira por inercia hasta que finalmente se detiene. El modo de inercia puede detenerse rápidamente si el motor o el vehículo están bajo alguna carga.
Pin # 23 se le asigna la capacidad de 'frenado' y hace que el motor se detenga y se detenga casi instantáneamente cuando se abre el interruptor asociado. Se permite que el motor funcione normalmente siempre que este interruptor se mantenga cerrado y la patilla # 7 esté conectada a tierra.
Recomendaría agrupar el interruptor en el pin # 7 (habilitar) y el pin # 23 (freno) juntos para que estos se cambien con una acción dual y juntos, esto probablemente ayudaría a 'matar' la rotación del motor de manera efectiva y colectiva y también permite que el motor funcione con una señal combinada de los dos pnouts.
'Rs' forma la resistencia de detección responsable de verificar las condiciones de sobrecarga o sobrecorriente del motor, en tales situaciones. la condición de 'falla' se dispara instantáneamente apagando el motor inmediatamente y el IC entra en un modo de bloqueo internamente. La condición permanece en este modo hasta que se corrige la falla y se restablece la normalidad.
Con esto concluye la explicación detallada sobre los distintos pines de los pines propuestos para el módulo de control de scooter eléctrico / rickshaw. Solo debe implementarse correctamente según la información de conexión que se muestra en el diagrama para implementar con éxito y seguridad las operaciones del vehículo.
Además, el IC MC33035 también incluye un par de características de protección incorporadas, como el bloqueo por baja volatilidad, que asegura que el vehículo se apague si en caso de que el IC se inhiba del voltaje de suministro mínimo requerido, y también una protección de sobrecarga térmica que garantiza que el IC nunca funciona con temperaturas excesivas.
Cómo conectar la batería (fuente de alimentación)
Según la solicitud, el vehículo eléctrico está especificado para funcionar con una entrada de 60 V y el usuario solicita un convertidor de carga para adquirir este nivel más alto de voltaje de una batería más pequeña de 12V o 24V.
Sin embargo, agregar un convertidor elevador podría hacer que el circuito sea más complejo innecesariamente y podría aumentar una posible ineficiencia. La mejor idea es usar 5nos de baterías de 12V en serie. Para obtener suficiente tiempo de respaldo y corriente para el motor de 1000 vatios, cada batería puede tener una capacidad nominal de 25 AH o más.
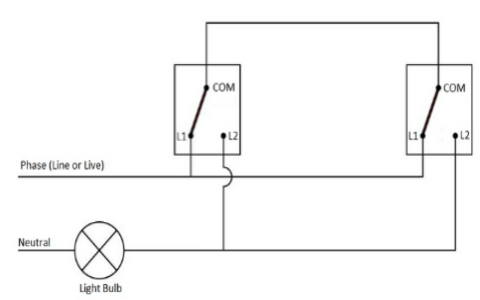
El cableado de las baterías se puede implementar consultando los siguientes detalles de conexión:

Artículo anterior: Circuito controlador de motor sin escobillas de alto voltaje Siguiente: Cómo funcionan los convertidores de Boost