
Introducción:
Hoy en día, muchas industrias utilizan robots debido a su alto nivel de rendimiento y confiabilidad, lo que es de gran ayuda para los seres humanos. La robótica para evitar obstáculos se utiliza para detectar obstáculos y evitar la colisión. Este es un robot autónomo. El diseño del robot para evitar obstáculos requiere la integración de muchos sensores de acuerdo con su tarea.
La detección de obstáculos es el requisito principal de este robot autónomo. El robot obtiene la información del área circundante a través de sensores montados en el robot. Algunos dispositivos de detección se utilizan para la detección de obstáculos como sensores de golpes, sensores infrarrojos, sensores ultrasónicos, etc. El sensor ultrasónico es el más adecuado para la detección de obstáculos, es de bajo costo y tiene una gran capacidad de alcance.

Vehículo robótico para evitar obstáculos
Principio de funcionamiento:
La evasión de obstáculos vehículo robótico utiliza sensores ultrasónicos para sus movimientos. Se utiliza un microcontrolador de las familias 8051 para lograr el funcionamiento deseado. Los motores están conectados a través del controlador de motor IC al microcontrolador. El sensor ultrasónico se coloca delante del robot.
Siempre que el robot sigue la ruta deseada, el sensor ultrasónico transmite las ondas ultrasónicas continuamente desde su cabezal sensor. Siempre que un obstáculo se acerca a él, las ondas ultrasónicas se reflejan en un objeto y esa información se pasa al microcontrolador. El microcontrolador controla los motores izquierdo, derecho, trasero, delantero, basándose en señales ultrasónicas. Para controlar la velocidad de cada motor se utiliza modulación de ancho de pulso (PWM).

Vehículo robótico de evitación de obstáculos de diagrama de bloques
Diferentes sensores utilizados para evitar obstáculos Vehículo robótico
1. Detección de obstáculos (sensor de infrarrojos):
Los sensores de infrarrojos se utilizan para la detección de obstáculos y la señal de salida del sensor se envía al microcontrolador. El microcontrolador controla el vehículo (avance / retroceso / parada) mediante el motor de CC que se coloca en el vehículo. Si cualquier obstáculo colocado en línea, el sensor de infrarrojos no recibe los rayos de luz y da señales al microcontrolador. El microcontrolador detendrá el vehículo inmediatamente y se encenderá la sirena. Después de un minuto, el robot verificará el estado de la ruta si se elimina un obstáculo, el robot se mueve lejos, de lo contrario, el robot volverá al lugar de inicio. El sensor detecta objetos emitiendo una breve ráfaga ultrasónica y luego escucha el eco. Bajo el control de un microcontrolador anfitrión, el sensor emite una breve explosión de 40 kHz. Esta explosión se aventura o viaja por el aire golpea un artículo y luego rebota una vez más hacia el sensor. El sensor proporciona un pulso de salida al host que terminará cuando se detecte el eco, por lo tanto, el ancho de un pulso al siguiente se toma en el cálculo mediante un programa para proporcionar resultados en una distancia del objeto.
2. Detección de ruta (sensor de proximidad):
Lo normal causa que tanto los sensores que dan las pautas como el robot lo sigan yendo directamente por el camino. Cuando la línea termina en ese momento, el robot retrocede a 180 y regresa al mismo lugar.

Estar en línea
Los sensores de proximidad se utilizan para la detección de caminos. Cuando no se detecta el sensor derecho en la línea curva, el microcontrolador activa el motor izquierdo para girar a la izquierda hasta la señal del sensor derecho. Una vez que se detecta la señal del sensor derecho, los dos motores se activan para avanzar. Cuando la línea termina en ese momento, el robot retrocede a 180 y regresa al mismo lugar.

Perdiendo la línea
3. Sensor ultrasónico:
El sensor ultrasónico se utiliza para la detección de obstáculos. El sensor ultrasónico transmite las ondas ultrasónicas desde su cabezal sensor y nuevamente recibe las ondas ultrasónicas reflejadas desde un objeto.
Hay muchas aplicaciones que utilizan sensores ultrasónicos como sistemas de alarma de instrucciones, abrepuertas automáticos, etc. El sensor ultrasónico es muy compacto y tiene un rendimiento muy alto.

Diagrama general del sensor ultrasónico
Principio de funcionamiento:
El sensor ultrasónico emite la señal corta y de alta frecuencia. Estos se propagan en el aire a la velocidad del sonido. Si chocan con algún objeto, reflejan una señal de eco al sensor. El sensor ultrasónico consta de un multivibrador, fijado a la base. El multivibrador es una combinación de resonador y vibrador. El resonador emite ondas ultrasónicas generadas por la vibración. El sensor ultrasónico consta de dos partes: el emisor que produce una onda de sonido de 40 kHz y el detector detecta una onda de sonido de 40 kHz y envía una señal eléctrica de regreso al microcontrolador.

Principio de funcionamiento ultrasónico
El sensor ultrasónico permite al robot ver y reconocer virtualmente un objeto, evitar obstáculos, medir la distancia. El rango de funcionamiento del sensor ultrasónico es de 10 cm a 30 cm.
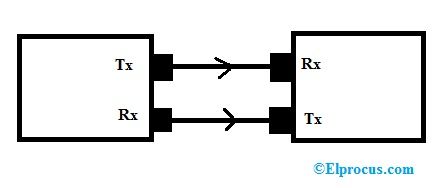
Funcionamiento del sensor ultrasónico:
Cuando se aplica un pulso eléctrico de alto voltaje al transductor ultrasónico, éste vibra en un espectro específico de frecuencias y genera una ráfaga de ondas sonoras. Siempre que un obstáculo se acerque al sensor ultrasónico, las ondas sonoras se reflejarán en forma de eco y generarán un pulso eléctrico. Calcula el tiempo transcurrido entre el envío de ondas sonoras y la recepción del eco. Los patrones de eco se compararán con los patrones de ondas sonoras para determinar la condición de la señal detectada.
Nota: El receptor ultrasónico detectará la señal del transmisor ultrasónico mientras las ondas de transmisión golpean el objeto. La combinación de estos dos sensores permitirá al robot detectar el objeto en su camino. El sensor ultrasónico está conectado frente al robot y ese sensor también ayudará al robot a navegar a través del pasillo de cualquier edificio.
Aplicaciones del sensor ultrasónico:
- Cambio automático de señales de tráfico
- Sistema de alarma contra intrusos
- Contando instrumentos interruptores de acceso parquímetros
- Sonar trasero de automóviles
Características del sensor ultrasónico:
- Compacto y ligero
- Alta sensibilidad y alta presión.
- Alta fiabilidad
- Consumo de energía de 20 mA
- Comunicación de entrada / salida de pulso
- Ángulo de aceptación estrecho
- Proporciona estimaciones de separación exactas sin contacto entre 2 cm y 3 m
- El LED de punto de explosión muestra estimaciones en el avance.
- El encabezado de 3 pines facilita la conexión utilizando un enlace de desarrollo de servo
Aplicaciones del vehículo robótico para evitar obstáculos:
- Especialmente aplicaciones militares
- Se puede utilizar para guerras urbanas.
Ahora tengo una idea clara sobre el concepto del vehículo robótico utilizando un sensor ultrasónico de detección de obstáculos si alguna otra pregunta sobre este tema o el concepto de los proyectos eléctricos y electrónicos dejan los comentarios a continuación.
Autor de la foto:
- Diagrama general del sensor ultrasónico por Letsmakerobots
- Principio de funcionamiento del sensor ultrasónico por Microsónico





{kind=link}