La publicación explica un circuito de robot simple que evita obstáculos sin microcontrolador y sin usar circuitos de controlador de motor especiales o circuitos integrados. La idea fue solicitada por el Sr. Faiyyaz
El diseño
Básicamente tiene la forma de vehículo en movimiento que es capaz de detectar y evitar obstáculos potenciales en su camino y cambiar su dirección apropiadamente para que su movimiento permanezca ininterrumpido, ¡simple!
El funcionamiento es, por tanto, automático sin ninguna intervención manual o humana.
La idea presentada de un robot que evita obstáculos sin microcontrolador, como su nombre indica, no emplea un microcontrolador y, por lo tanto, es extremadamente simple de construir y adecuado para cualquier aficionado nuevo.
Mientras diseñaba el circuito, me di cuenta de que para implementar el principio se necesitarían al menos un par de módulos sensores de obstáculos, ya que el uso de un solo módulo puede causar un movimiento errático del motor y puede no ayudar a una desviación suave o un giro del vehículo hacia un camino libre.
La configuración del motor del vehículo es bastante similar a la coche de juguete de control remoto que había discutido en una de las publicaciones anteriores.
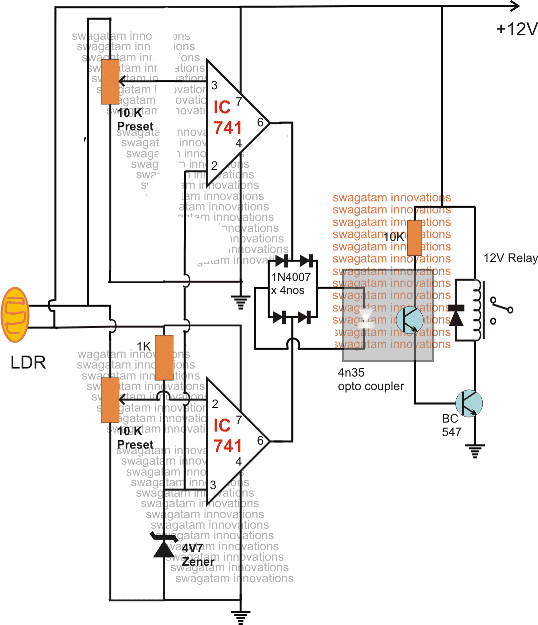
El siguiente diagrama representa uno de los módulos del sistema y, por lo tanto, se necesitarían dos o un par de estos módulos en los lados derecho e izquierdo del vehículo.
La idea es simple y funciona sin microcontrolador y sin circuitos integrados de controlador de motor especiales. Eso significa que puede hacerlo sin ningún tipo de codificación y sin usar ningún tipo de controlador de motor complejo IC ... y el circuito le permite usar cualquier motor de CC independientemente de su potencia, por lo que incluso los vehículos que evitan obstáculos de alta potencia podrían ser fabricados con este circuito que normalmente se utilizan en centros comerciales y puntos de venta similares.
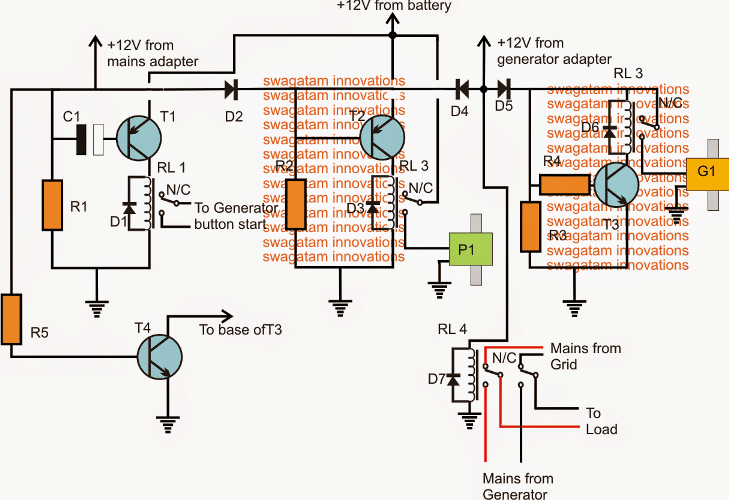
Diagrama de circuito

Ahora intentemos comprender el circuito anterior con la ayuda de la siguiente explicación:
Cómo funciona
El IC 555 está configurado como un transmisor de infrarrojos y está configurado para generar una frecuencia constante de 38 kHz, mientras que el circuito transistorizado contiguo está configurado como la etapa del receptor o la etapa del sensor de infrarrojos.
Supongamos que es el módulo del lado derecho, y supongamos que este módulo es el primero en detectar un obstáculo en el camino.
Por lo tanto, tan pronto como se detecta un obstáculo, la frecuencia de 38 kHz generada por el 555 IC se refleja hacia el sensor del circuito receptor contiguo.
El receptor activa instantáneamente los transistores asociados de manera que el transistor controlador final no puede conducir.
Ahora, se supone que el motor que está controlado por este transistor está ubicado en el lado izquierdo del vehículo, es decir, en el lado opuesto de este módulo ... de manera similar, el motor ubicado en el lado derecho está realmente controlado por el módulo del lado izquierdo .
En consecuencia, cuando se activa el módulo detector de obstáculos del lado derecho asumido anteriormente, detiene el motor del lado izquierdo, mientras que el motor del lado derecho puede moverse normalmente.
Esta situación hace que el vehículo se vea obligado a tomar un desvío del lado izquierdo ... lo que significa que ahora el supuesto módulo izquierdo comienza a recibir señales de obstáculos aún más fuertes y sigue obligando al vehículo a avanzar más en el desvío en curso hasta que haya evitado por completo el obstáculo. . El módulo ahora deja de recibir las señales de obstáculos y el vehículo comienza a avanzar normalmente en su nueva ruta.
Mientras se realiza el desvío anterior, el módulo del lado izquierdo se ve obligado a aislarse cada vez más y alejarse del obstáculo para que no tenga la oportunidad de interferir en el procedimiento y permitir un desvío limpio y suave del vehículo.
Se implementan exactamente los mismos procedimientos en caso de que el módulo del lado izquierdo detecte el obstáculo delante del módulo del lado derecho, donde el vehículo se ve obligado a moverse más y más hacia el lado derecho.
También podemos ver una etapa de circuito de 'desactivación' en el módulo que están interconectados a través de los módulos del lado izquierdo y derecho. Esta etapa se introduce a propósito para garantizar que ambos módulos nunca se activen juntos.
Por lo tanto, por ejemplo, si el módulo del lado izquierdo se convierte en el primero en detectar un obstáculo, inmediatamente deshabilita el módulo del lado derecho e inicia el desvío del vehículo por la derecha y viceversa.
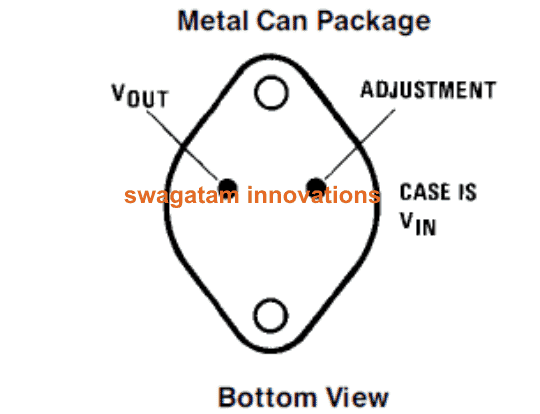
El sensor IC podría ser un serie TSOP17XX estándar
Para obtener más información sobre el sensor IC anterior, puede aprender cómo conectar TSOP1738 IC
Y el motor debe estar equipado con cajas de engranajes para que el movimiento se mantenga originalmente a un nivel controlado.
Configuración de la rueda
La configuración completa del módulo izquierdo y derecho y las conexiones eléctricas asociadas se puede ver en la siguiente figura:

Actualizar
Un poco de pensamiento nos dice que el circuito de robot simple para evitar obstáculos anterior también podría implementarse utilizando un solo módulo, en lugar de los dos.
Sin embargo, un solo módulo permitiría al vehículo realizar un desvío de un solo lado cada vez que detecte un obstáculo, por lo que el sistema podría configurarse para tomar un desvío en sentido horario o antihorario dependiendo de qué motor esté conectado con el circuito para las acciones.
El ejemplo de configuración se puede visualizar en la siguiente imagen:

Sin embargo, parece que hay un problema con la configuración del motor único anterior. Suponga que el vehículo encuentra una esquina en ángulo recto en el lado izquierdo. Esto obligará al vehículo a seguir moviéndose en el sentido contrario a las agujas del reloj, hasta que dé un giro en U y comience a retroceder hacia la misma dirección desde donde había comenzado. Esto no es algo que el usuario agradecería.
Anterior: Resistencias SMD - Introducción y funcionamiento Siguiente: Cómo funciona un acelerómetro