La publicación explica un circuito temporizador de motor bidireccional programable para controlar un mecanismo industrial personalizado. La idea fue solicitada por el Sr. Milton
Especificaciones técnicas
Soy un especialista en vidrio, bastante bueno con el bricolaje, etc., pero no demasiado caliente con la electricidad. Estoy planeando la construcción de una caja de exhibición de reloj de vidrio templado de 10 mm, sin embargo, a nuestro cliente le gustaría que fuera una caja enrolladora de reloj.
He establecido que necesitamos 4 motores de CA de 10 rpm y 24 V para funcionar simultáneamente. Deben comenzar a girar cada hora, durante 15-20 minutos.
Sin embargo, deben girar en el sentido de las agujas del reloj y luego en el sentido contrario de las agujas del reloj de hora en hora. Sería bueno si también pudiera tener una opción manual para arrancar y detener los motores cuando quisiera.
¿Es esto algo en lo que alguien pueda ayudar? ¿Por favor?
¡Gracias!
Milton
El diseño
El circuito propuesto se puede entender con la siguiente descripción:
La etapa que comprende los dos circuitos integrados 4060 está configurada como una etapa programable. El circuito integrado 4060 superior está cableado como circuito del temporizador de apagado, mientras que el circuito integrado inferior decide el tiempo de encendido del circuito.
La sección en el lado derecho que consta del IC 4017 forma un circuito flip flop estándar que alterna su salida de 3 a 2 y viceversa en respuesta a cada disparo alto en su pin # 14.
Cuando se enciende la energía, el 4060 superior comienza a contar. Esta etapa puede configurarse para producir un retraso de tiempo de 20 minutos según las especificaciones solicitadas.
Al mismo tiempo, el pin # 3 de IC4017 produce una lógica alta ya que es el pin de inicio del IC4017. El motor conectado ahora comienza a girar en una dirección particular dependiendo de su polaridad con los relés.
Después de los 20 minutos establecidos, transcurre el tiempo, el pin # 3 del 4060 superior se vuelve alto, lo que inicia el 4060 inferior.
Este alto del 4060 aplica un disparador lógico alto en el pin 14 de IC4017 a través del condensador de 0.22uF que fuerza su salida a saltar del pin3 al pin2.
El relé en la etapa del controlador pin2 / 7 ahora se activa cortando el suministro del motor y deteniendo así el motor.
Después de aproximadamente 1 hora, que debería ser el intervalo especificado establecido con el IC 4060 inferior, su pin n. ° 3 se eleva y restablece instantáneamente el IC4060 superior para que vuelva a su modo anterior.
En el proceso, también alterna el IC4017 para que su salida cambie del pin2 al pin4, el relé en el pin4 se restablece y el motor comienza a girar, pero ahora en la dirección opuesta.
El motor sigue girando hasta los siguientes 20 minutos, después de lo cual, como se indicó anteriormente, la secuencia de IC 4017 salta al pin 7 y el motor se detiene nuevamente.
Con el disparo posterior posterior del 4060 IC inferior, el sistema vuelve a su situación inicial y el ciclo continúa repitiéndose como se propone en la solicitud.
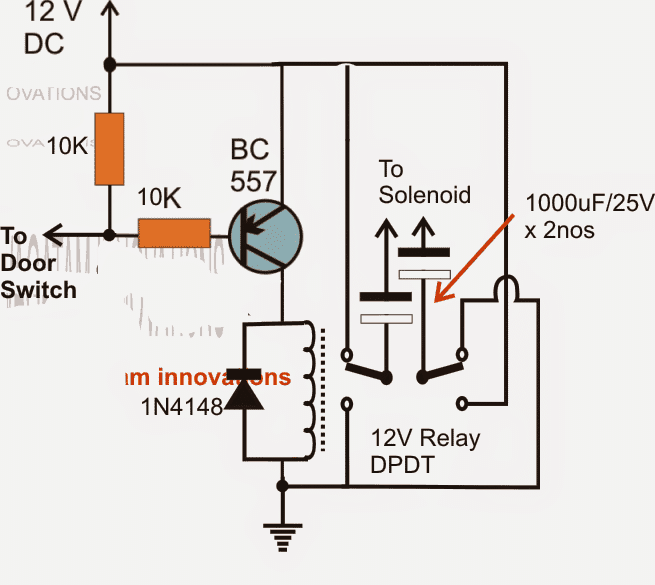
Diagrama de circuito

Artículo anterior: Circuito del temporizador del controlador de alimentación de aves de corral Siguiente: Tutorial de PIC: de registros a interrupciones