En general, un registro se puede definir como un dispositivo utilizado para almacenar datos binarios, pero si desea almacenar varios bits de datos, se utiliza un conjunto de flip flops que se conectan en serie. Los datos que se almacenan en los registros se pueden desplazar mediante el uso de registros de desplazamiento en el lado derecho o en el lado izquierdo proporcionando pulsos CLK. Registro de turnos es un grupo de chancletas Se utiliza para almacenar múltiples bits de datos. De manera similar, se puede formar un registro de desplazamiento con n bits simplemente conectando n flip-flops donde cada flip-flop simplemente almacena un solo bit de datos. Una vez que el registro desplaza los bits hacia el lado derecho, es el registro de desplazamiento a la derecha, mientras que si se desplaza hacia el lado izquierdo, se conoce como registro de desplazamiento a la izquierda. Este artículo analiza una descripción general de uno de los tipos de registro de desplazamiento, a saber, registro de desplazamiento serial en paralelo o Registro de desplazamiento SIPO .
¿Qué es el registro de turnos SIPO?
El registro de desplazamiento que permite la entrada en serie y la salida en paralelo se conoce como registro de desplazamiento SIPO. En el registro SIPO, el término SIPO significa entrada en serie y salida en paralelo. En este tipo de registro de desplazamiento, los datos de entrada se dan bit a bit en serie. Para cada pulso de reloj, los datos de entrada en todos los FF se pueden desplazar en una sola posición. El o/p en cada flip-flop se puede recibir en paralelo.
Diagrama de circuito
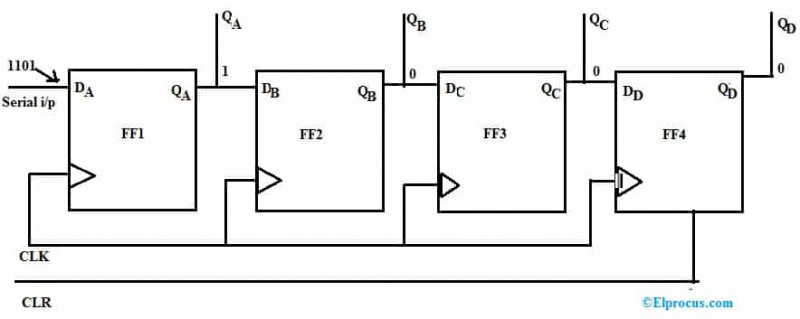
los Diagrama de circuito de registro de desplazamiento SISO se muestra a continuación. Este circuito se puede construir con flip-flops 4D los cuales se conectan como se muestra en el diagrama donde se da adicionalmente la señal CLR a la señal CLK a todos los FFs o RESET. En el circuito anterior, la primera salida FF se entrega a la segunda entrada FF. Todos estos cuatro flip-flops D están conectados entre sí en serie porque se da la misma señal CLK a cada flip-flop.
Funcionamiento del registro de turnos SIPO
El funcionamiento del registro de desplazamiento SIPO es; que toma la entrada de datos en serie del primer flip flop del lado izquierdo y genera una salida de datos en paralelo. El circuito de registro de desplazamiento SIPO de 4 bits se muestra a continuación. La operación de este registro de desplazamiento es, primero, todos los flip flops del circuito de FF1 a FF4 tienen que REINICIARSE para que todas las salidas de FF como QA a QD estén en el nivel lógico cero, por lo que no hay salida de datos en paralelo.
La construcción del registro de desplazamiento SIPO se muestra arriba. En el diagrama, la primera salida de flip flop 'QA' está conectada a la segunda entrada de flip flop 'DB'. La segunda salida de flip flops 'QB' está conectada a la tercera entrada de flip flops DC, y la tercera salida de flip flops 'QC' está conectada a la cuarta entrada de flip flops 'DD. Aquí, QA, QB, QC y QD son salidas de datos.
Inicialmente, toda la salida se convertirá en cero sin pulso CLK; todos los datos se convertirán en cero. Tomemos un ejemplo de entrada de datos de 4 bits como 1101. Si aplicamos el primer pulso de reloj '1' al primer flip flop, los datos que se ingresarán en FF y QA se convierten en '1', y quedan todas las salidas como QB , QC y QD se convertirán en cero. Entonces, la primera salida de datos es '1000'
Si aplicamos el segundo pulso de reloj como '0' al primer flip flop, QA se convierte en '0', QB se convierte en '0', QC se convierte en '0' y QD se convierte en '0'. Entonces, la segunda salida de datos se convertirá en '0100' debido al proceso de cambio a la derecha.
Si aplicamos el tercer pulso de reloj como '1' al primer flip flop, QA se convierte en '1', QB se convierte en '0', QC se convierte en '1' y QD se convierte en '0'. Entonces, la tercera salida de datos se convertirá en '1011' debido al proceso de cambio a la derecha.
Si aplicamos el cuarto pulso de reloj como '1' al primer flip flop, entonces QA se convierte en '1', QB se convierte en '1', QC se convierte en '0' y QD se convierte en '1'. Entonces, la tercera salida de datos se convertirá en '1101' debido al proceso de cambio a la derecha.
Tabla de verdad del registro de desplazamiento SIPO
La tabla de verdad del registro de desplazamiento SIPO se muestra a continuación.
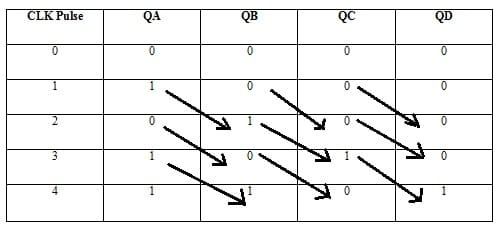
Diagrama de tiempo
los diagrama de tiempo del registro de desplazamiento SIPO se muestra a continuación.
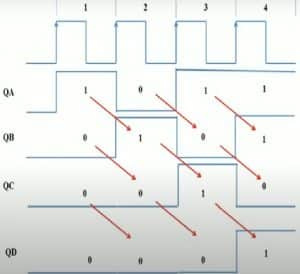
Aquí estamos usando una señal CLK i/p de flanco positivo. En un primer pulso de reloj, los datos de entrada se convierten en QA = '1' y todos los demás valores como QB, QC y QD se convierten en '0'. Entonces la salida se convertirá en '1000'. En el segundo pulso de reloj, la salida se convertirá en '0101'. En el tercer pulso de reloj, la salida será '1010' y en el cuarto pulso de reloj, la salida será '1101'.
Código Verilog del registro de turnos SIPO
El código Verilog para el registro de desplazamiento SIPO se muestra a continuación.
módulo sipomod(clk,clear, si, po);
entrada clk, si, claro;
salida [3:0] po;
registro [3:0] tmp;
registro [3:0] po;
siempre @(postge clk)
empezar
Si claro)
tmp <= 4'b0000;
más
tmp <= tmp << 1;
tmp[0] <= si;
po = tmp;
final
módulo final
Circuito de registro de cambio 74HC595 IC SIPO y su funcionamiento
Un IC 74HC595 es un registro de desplazamiento de salida en paralelo en serie de 8 bits, por lo que utiliza entradas en serie y proporciona salidas en paralelo. Este IC incluye 16 pines y está disponible en diferentes paquetes como SOIC, DIP, TSSOP y SSOP.
La configuración de pines de 74HC595 se muestra a continuación, donde cada pin se analiza a continuación.
Pines 1 a 7 y 15 (QB a QH y QA): Estos son los pines o/p que se utilizan para conectar dispositivos de salida como pantallas de 7 segmentos y LED.
Pin8 (tierra): Este pin GND simplemente se conecta al pin GND de la fuente de alimentación del microcontrolador.
Pin9 (QH): Este pin se usa para conectarse al pin SER de un IC diferente y dar la misma señal CLK a ambos IC para que funcionen como un solo IC que incluye 16 salidas.
Pin16 (Vcc): Este pin se usa para conectarse al microcontrolador, de lo contrario, la fuente de alimentación porque es un IC de nivel lógico de 5V.
Pin14 (SER): Es el Pin Serial i/p donde los datos se ingresan en serie a través de este pin.
Pin11 (SRCLK): Es el pin CLK del registro de desplazamiento el que funciona como el CLK para el registro de desplazamiento porque la señal CLK se transmite a lo largo de este pin.
Pin12 (RCLK): Es el pin Register CLK que se usa para observar o/ps en los dispositivos que están conectados a estos circuitos integrados.
Pin10 (SRCLR): Es el pin CLR del registro de desplazamiento. Este pin se usa principalmente cuando necesitamos borrar el almacenamiento del registro.
Pin13 (OE): Es el pin de activación de o/p. Una vez que este pin se establece en ALTO, el registro de desplazamiento se establece en una condición de impedancia alta y no se transmiten o/ps. Si configuramos este pin en bajo, podemos obtener el o/ps.
74HC595 CI en funcionamiento
El diagrama de circuito de 74HC595 IC para controlar los LED se muestra a continuación. Los 3 pines del registro de desplazamiento son necesarios para conectarse a Arduino como los pines 11, 12 y 14. Los ocho LED se conectarán simplemente a este IC de registro de desplazamiento.
Los componentes necesarios para diseñar este circuito incluyen principalmente un IC de registro de desplazamiento 74HC595, Arduino UNO, fuente de alimentación de 5 V, placa de pruebas, 8 LED, resistencias de 1 KΩ – 8 y cables de conexión.
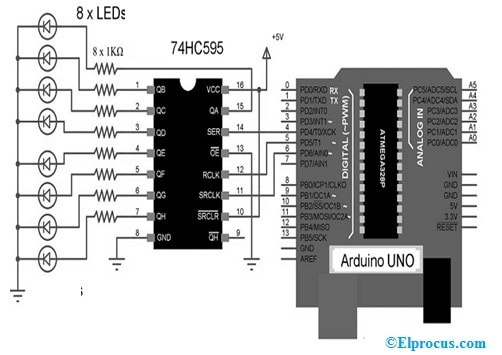
Primero, el Pin Serial i/p del Shift Register necesita conectarse al Pin-4 de Arduino Uno. Después de eso, conecte los pines CLK y pestillo como los pines 11 y 12 de IC a los pines 5 y 6 de Arduino Uno respectivamente. Los LED se conectan mediante resistencias limitadoras de corriente de 1 KΩ a los pines 8-o/p del IC. Se utiliza una fuente de alimentación de 5 V separada para el IC 74HC595 con GND común a Arduino antes de suministrar 5 V desde Arduino.
Código
El código simple para activar 8 LED en una serie se muestra a continuación.
int latchPin = 5;
int clkPin = 6;
pin de datos int = 4;
byte LED = 0;
configuración vacía ()
{
Serial.begin(9600);
pinMode(latchPin, SALIDA);
pinMode(datosPin, SALIDA);
pinMode(clkPin, SALIDA);
}
bucle vacío ()
{
inti=0;
LED = 0;
shiftLED();
retraso (500);
para (i = 0; i < 8; i++)
{
conjunto de bits (LED, i);
Serial.println(LED);
shiftLED();
retraso (500);
}
}
void shiftLED()
{
digitalWrite(latchPin, BAJO);
shiftOut(Pin de datos, pin de clk, MSBFIRST, LED);
digitalWrite(latchPin, ALTO);
}
El funcionamiento de este circuito de registro de desplazamiento es que, al principio, los 8 LED se apagarán porque el LED variable de byte se establece en cero. Ahora, cada bit se establece en 1 con la función 'bitSet' y se desplaza con la función 'shiftOut'. Asimismo, todos los LED se encenderán en la misma serie. Si desea apagar el LED, puede utilizar la función 'bitClear'.
El IC de registro de desplazamiento 74HC595 se utiliza en diferentes aplicaciones como servidores, control de LED, control industrial, aparatos electrónicos, conmutadores de red, etc.
Aplicaciones
los aplicaciones del registro de desplazamiento de salida paralela de entrada en serie se muestra a continuación.
- En general, el registro de desplazamiento se usa para almacenar datos temporales, se usa como un anillo y Johnson Contador de anillos .
- Estos se utilizan para la transferencia de datos y la manipulación.
- Estos flip flops se utilizan principalmente dentro de las líneas de comunicación siempre que sea necesaria una línea de datos que se desmultiplexe en numerosas líneas paralelas porque este registro de desplazamiento se utiliza para cambiar los datos de serie a paralelo.
- Estos se utilizan para el cifrado y descifrado de datos.
- Este registro de desplazamiento se utiliza dentro de CDMA para generar código PN o Número de Secuencia de Pseudo Ruido.
- ¡Podemos usarlos para rastrear nuestros datos!
- El registro de desplazamiento SIPO se utiliza en varias aplicaciones digitales para la conversión de datos.
- A veces, este tipo de registro de desplazamiento simplemente se conecta al microprocesador una vez que se necesitan más pines GPIO.
- La aplicación práctica de este registro de desplazamiento SIPO es dar los datos de salida del microprocesador a un indicador de panel remoto.
Por lo tanto, esta es una descripción general de la SIPO registro de turnos – circuito, trabajo, tabla de verdad y diagrama de tiempo con aplicaciones. Los componentes de registro de desplazamiento SIPO más utilizados son 74HC595, 74LS164, 74HC164/74164, SN74ALS164A, SN74AHC594, SN74AHC595 y CD4094. Estos registros son de uso muy rápido, los datos se pueden convertir muy fácilmente de serie a paralelo y su diseño es simple. Aquí hay una pregunta para usted, ¿qué es el registro de desplazamiento PISO?