

Robot de espionaje War Field con cámara de visión nocturna
El robot espía, como su nombre indica, es el que se utiliza para espiar territorios enemigos. Sus aplicaciones pueden ser:
- En el momento de la guerra, donde se puede usar para recopilar información del terreno enemigo y monitorear esa información en un área lejana y segura, y diseñar de manera segura un plan para el contraataque.
- Rastrear ubicaciones de organizaciones terroristas y luego planificar un ataque en el momento adecuado.
- Vigilancia de cualquier zona afectada por un desastre a la que los seres humanos no puedan ir.
Una breve idea sobre el robot espía War Field
Así que tengamos una breve idea sobre cómo podemos usar un robot en campos de guerra con fines de espionaje. Todo lo que se necesita es una cámara inalámbrica instalada en el circuito del robot que captura imágenes y videos de territorios enemigos y transmite estas imágenes, que son recibidas por la unidad receptora del televisor.
Podemos diseñar un simple prototipo de guerra. robot espía de campo que se puede controlar de forma remota y las imágenes transmitidas por la cámara se pueden monitorear y analizar en un televisor.
Implementación de hardware del robot espía War Field
Todo lo que necesitamos son los siguientes componentes para diseñar un robot espía en el campo de guerra, además de una base con ruedas y motores.
- Unidad de sensor: una cámara de visión nocturna inalámbrica: Además de en qué consiste una cámara básica, consta de una unidad transmisora. Captura imágenes y las transmite a través del transmisor en forma de señales digitales, que son recibidas por la unidad receptora conectada al televisor o computadora. La cámara puede estar a una distancia de hasta 30 millas del receptor. A cámara de visión nocturna puede recibir iluminación amplificando la luz visible usando intensificadores de imagen o usando luz infrarroja directamente por objetos - imagen térmica o luz infrarroja reflejada por objetos - iluminación infrarroja cercana.
- Una unidad receptora: El robot también consta de una unidad receptora que recibe las señales de comando para controlar los motores y, por lo tanto, la unidad del robot.
- Actuadores: Consta de dos motores de CC como actuadores que proporcionan movimiento hacia adelante y hacia atrás al robot.
- Unidad de control: Consiste en una unidad transmisora remota que consta de un microcontrolador, un codificador y un módulo de RF y una unidad receptora integrada en el circuito que consta de un módulo receptor de RF, un microcontrolador y un decodificador.
¿Cómo funciona una cámara de visión nocturna con robot espía de campo de guerra?
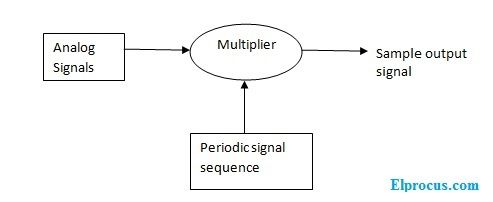
La cámara de visión nocturna inalámbrica incorporada en el robot consta de un transmisor inalámbrico. Se coloca un grupo de LED IR que se utilizan para proporcionar luz IR a las fuentes de imagen. La razón por la que se prefiere la luz infrarroja es que durante la noche suele estar oscura y, dado que cualquier cámara necesita luz para iluminarse, la luz infrarroja es la opción más preferida ya que todos los objetos emiten un rango de luz infrarroja. La cámara se alimenta con una batería de 12 V y captura estas imágenes y las transmite a la unidad receptora conectada a una unidad de televisión. Las imágenes son convertidas en señales digitales por la unidad transmisora y la unidad receptora recibe estas señales digitales y las reconvierte en imágenes y estas imágenes o videos son luego monitoreados y analizados en una unidad de televisión.

Diagrama de bloques que muestra el funcionamiento básico del robot con cámara de visión nocturna
Controlando el robot espía del campo de guerra
Todo el control del robot se realiza de forma remota. Consiste en una sección transmisora que transmite la información requerida a la sección receptora. El robot se cubre simplemente presionando algunos botones en el lado del transmisor.

Diagrama de bloques que muestra el robot de espionaje de campo del transmisor de guerra
La unidad transmisora consta de un codificador que recibe la entrada de datos en paralelo del microcontrolador a través de los botones y transmite estos datos en paralelo en formato serie a través del módulo de RF. Al presionar el botón pulsador respectivo, el microcontrolador está programado para enviar señales relevantes al codificador en forma paralela. El codificador convierte estas señales paralelas a forma serial para ser transmitidas por el módulo de RF. Estos datos en serie se modulan con una señal portadora utilizando un transmisor de RF y es el transmisor. Por ejemplo, si pulsamos el botón izquierdo, el microcontrolador envía el comando a la unidad receptora a través del codificador y el módulo de RF.

Diagrama de bloques que muestra el robot espía receptor del campo de guerra
La unidad receptora consta de un módulo receptor RF que demodula la señal recibida y un decodificador que recibe los datos en serie a través del módulo receptor RF y los convierte en forma paralela. El microcontrolador usa estos datos para dar una señal de control apropiada al controlador del motor IC para controlar el funcionamiento de los dos motores. Por lo tanto, el robot puede moverse hacia adelante o hacia atrás controlando el motor, mientras que la cámara hace su trabajo simultáneamente.
Robots en militares
Ahora que teníamos una breve idea sobre el robot de campo de guerra, recordemos brevemente los robots prácticos en defensa.
Una de las características básicas de los robots utilizados en operaciones militares es que no son completamente automáticos. En realidad, están controlados de forma remota por seres humanos. Los robots o máquinas no tripuladas como se denominan pueden ser cualquier objeto en movimiento o un avión volador equipado con todo el equipo necesario como sensores, LIDARS (RADARES de comunicación basados en láser), cámaras, etc. Sus operaciones pueden ser desde la eliminación de bombas hasta la inspección del enemigo. territorios.
Hay 3 tipos de máquinas no tripuladas que se utilizan en operaciones militares:
- Vehículo terrestre no tripulado (UGV): se utilizan con fines terrestres. Pueden transportar una carga pesada, moverse en terrenos irregulares y tener varios sensores y cámaras instalados en ellos.

Gladiador táctico UGV
- Vehículo aéreo no tripulado (UAV): Se utilizan para transportar armas aéreas y son básicamente máquinas voladoras.

Vehículo aéreo no tripulado MQ-9 Reaper
- Vehículo submarino no tripulado (UUV): son básicamente submarinos o máquinas que pueden inspeccionar bajo el agua.

Talismán UUV
Ahora que tenemos un conocimiento del robot de campo de guerra, entremos en la tarea de saber sobre el uso de robótica en las operaciones militares de nuestro país y cómo avanza nuestra organización de defensa en este campo?
Créditos fotográficos:
- Gladiator Tactical UGV de wikimedia
- Vehículo aéreo no tripulado MQ-9 Reaper de wikimedia
- Talismán UUV de ingenieros de garaje




{kind=link}
{kind=link}