La detección ultrasónica se utiliza con mayor frecuencia en aplicaciones industriales para detectar pistas ocultas, discontinuidades en metales, materiales compuestos, plásticos, cerámicas y para la detección del nivel de agua. Para ello, se han utilizado las leyes de la física que indican la propagación de ondas sonoras a través de materiales sólidos desde que los sensores ultrasónicos utilizan sonido en lugar de luz para la detección.
¿Cuál es el principio de detección ultrasónica?
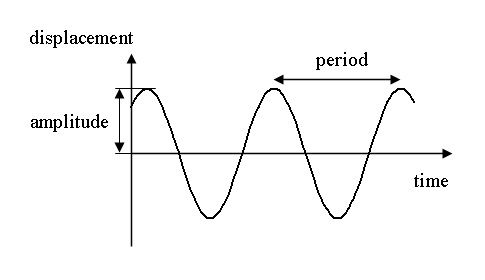
Definición de onda de sonido
El sonido es una onda mecánica que viaja a través de los medios, que pueden ser sólidos, líquidos o gaseosos. Las ondas sonoras pueden viajar a través de los medios con una velocidad específica que depende del medio de propagación. Las ondas sonoras que tienen alta frecuencia se reflejan en los límites y producen patrones de eco distintivos.
Leyes de la física de las ondas sonoras
Las ondas sonoras tienen frecuencias específicas o un número de oscilaciones por segundo. Los seres humanos pueden detectar sonidos en un rango de frecuencia de aproximadamente 20 Hz a 20 KHz. Sin embargo, el rango de frecuencia normalmente empleado en detección ultrasónica es de 100 KHz a 50MHz. La velocidad del ultrasonido en un momento y una temperatura determinados es constante en un medio.
W = C / F (o) W = CT
Donde W = longitud de onda
C = Velocidad del sonido en un medio
F = Frecuencia de onda
T = período de tiempo
Los métodos más comunes de examen ultrasónico utilizan ondas longitudinales u ondas de corte. La onda longitudinal es una onda de compresión en la que el movimiento de las partículas está en la misma dirección que la onda de propagación. La onda cortante es un movimiento ondulatorio en el que el movimiento de las partículas es perpendicular a la dirección de propagación. La detección ultrasónica introduce ondas sonoras de alta frecuencia en un objeto de prueba para obtener información sobre el objeto sin alterarlo ni dañarlo de ninguna manera. Se miden dos valores en detección ultrasónica.
La cantidad de tiempo que tarda el sonido en viajar a través del medio y la amplitud de la señal recibida. En función de la velocidad y el tiempo, se puede calcular el espesor.
El espesor del material = Velocidad del sonido del material X Tiempo de lucha
Transductores para propagación de ondas y detección de partículas
Para enviar ondas sonoras y recibir un eco se utilizarán sensores ultrasónicos, normalmente llamados transceptores o transductores. Funcionan con un principio similar al radar que convertirá la energía eléctrica en energía mecánica en forma de sonido y viceversa.
Los transductores comúnmente utilizados son transductores de contacto, transductores de haz de ángulo, transductores de línea de retardo, transductores de inmersión y transductores de elemento dual. Los transductores de contacto se utilizan normalmente para localizar huecos y grietas en la superficie exterior de una pieza, así como para medir el espesor. Los transductores de haz de ángulo utilizan el principio de reflexión y conversión de modo para producir ondas transversales u ondas longitudinales refractadas en el material de prueba.
Los transductores de línea de retardo son transductores de onda longitudinal de un solo elemento que se utilizan junto con una línea de retardo reemplazable. Una de las razones para elegir un transductor de línea de retardo es que se puede mejorar la resolución cerca de la superficie. El retardo permite que el elemento deje de vibrar antes de que se pueda recibir una señal de retorno del reflector.
Las principales ventajas que ofrecen los transductores de inmersión sobre los transductores de contacto son: el acoplamiento uniforme reduce las variaciones de sensibilidad, reduce el tiempo de escaneo y aumenta la sensibilidad a los reflectores pequeños.
Operación de sensores ultrasónicos:
Cuando se aplica un pulso eléctrico de alto voltaje al transductor ultrasónico, éste vibra en un espectro específico de frecuencias y genera una ráfaga de ondas sonoras. Siempre que un obstáculo se acerque al sensor ultrasónico, las ondas sonoras se reflejarán en forma de eco y generarán un pulso eléctrico. Calcula el tiempo transcurrido entre el envío de ondas sonoras y la recepción del eco. Los patrones de eco se compararán con los patrones de ondas sonoras para determinar la condición de la señal detectada.
3 Aplicaciones que implican detección ultrasónica:
La distancia del obstáculo o las discontinuidades en los metales está relacionada con la velocidad de las ondas sonoras en un medio a través del cual pasan las ondas y el tiempo necesario para la recepción del eco. Por tanto, la detección ultrasónica se puede utilizar para encontrar las distancias entre partículas, para detectar las discontinuidades en los metales y para indicar el nivel del líquido.
- Medición de distancia ultrasónica
Los sensores ultrasónicos se utilizan para aplicaciones de medición de distancia. Estos dispositivos transmiten regularmente una breve ráfaga de sonido ultrasónico a un objetivo, que refleja el sonido de regreso al sensor. Luego, el sistema mide el tiempo que tarda el eco en regresar al sensor y calcula la distancia al objetivo utilizando la velocidad del sonido dentro del medio.
Se utilizan diferentes tipos de transductores dentro de los dispositivos de limpieza por ultrasonidos accesibles industrialmente. Un transductor ultrasónico se fija a una bandeja de acero inoxidable que se llena con un solvente y se le aplica una onda cuadrada, lo que confiere energía de vibración al líquido.

Sensor de distancia ultrasónico
Los sensores de distancia ultrasónicos miden la distancia usando un sonar, un latido ultrasónico (muy por encima del oído humano) se transmite desde la unidad y la distancia al objetivo se determina midiendo el tiempo requerido para el retorno del eco. La salida del sensor ultrasónico es un latido de ancho variable que se compara con la distancia al objetivo.
8 características del sensor de distancia ultrasónico:
- Voltaje de suministro: 5 V (CC).
- Corriente de suministro: 15 mA.
- Frecuencia de modulación: 40Hz.
- Salida: 0 - 5V (Salida alta cuando se detecta un obstáculo en el rango).
- Ángulo de haz: máximo 15 grados.
- Distancia: 2cm - 400cm.
- Precisión: 0,3 cm.
- Comunicación: pulso TTL positivo.
Operación del sensor de distancia ultrasónico:
El módulo de sensor ultrasónico consta de un transmisor y un receptor. El transmisor puede emitir un sonido ultrasónico de 40 KHz, mientras que el receptor máximo está diseñado para aceptar sólo ondas de sonido de 40 KHz. El sensor ultrasónico del receptor que se mantiene al lado del transmisor podrá así recibir 40 KHz reflejados, una vez que el módulo enfrente cualquier obstáculo en el frente. Por lo tanto, cada vez que se presenta algún obstáculo por delante del módulo ultrasónico, se calcula el tiempo transcurrido desde el envío de las señales hasta su recepción, ya que el tiempo y la distancia están relacionados para las ondas sonoras que atraviesan el medio aéreo a 343,2 m / seg. Al recibir la señal, el programa MC mientras se ejecuta muestra los datos, es decir, la distancia medida en una pantalla LCD interconectada con el microcontrolador en cms.

Circuito del sensor de distancia ultrasónico
Característicamente, las aplicaciones de robótica son muy populares, pero también encontrará que este producto es útil en sistemas de seguridad o como reemplazo de infrarrojos si así lo desea.
- Transductor ultrasónico para detección de nivel de agua

Detección ultrasónica
Diagrama de bloques para controlador de nivel de líquido sin contacto

controlador de nivel de líquido sin contacto
El diagrama de circuito anterior muestra el controlador de nivel de líquido sin contacto en este diagrama, el módulo del sensor ultrasónico está interconectado con el microcontrolador. Siempre que la distancia de nivel medida en cm cae por debajo de un punto de ajuste, la bomba comienza detectando la señal que sale y recibe el nivel que llega al transductor ultrasónico que se alimenta al microcontrolador. Cuando el microcontrolador recibe la señal del transductor ultrasónico, activa el relé a través de un MOSFET que acciona la bomba en ON o en OFF.
- Detección de obstáculos por ultrasonidos
Los sensores ultrasónicos se utilizan para detectar la presencia de objetivos y medir la distancia a los objetivos en muchas plantas de procesamiento robotizadas y plantas de proceso. Los sensores con una salida digital ON u OFF están disponibles para detectar la presencia de objetos y los sensores con una salida analógica que cambia en relación con la distancia de separación entre el sensor y el objetivo están disponibles comercialmente.

El sensor ultrasónico de obstáculos consta de un conjunto de transmisor y receptor ultrasónico que funcionan a la misma frecuencia. El punto en el que algo se mueve en la zona asegurada con la compensación fina del circuito se agrava y se activa el zumbador / alarma.

Sensor ultrasónico de obstáculos
Características:
- Consumo de energía de 20 mA
- Comunicación de entrada / salida de pulso
- Ángulo de aceptación estrecho
- Proporciona estimaciones de separación exactas sin contacto entre 2 cm y 3 m
- El LED de punto de explosión muestra estimaciones en el avance.
- El encabezado de 3 pines facilita la conexión utilizando un enlace de desarrollo de servo
Especificaciones:
- Fuente de alimentación: 5 V CC
- Corriente de reposo:<15mA
- Ángulo efectivo:<15°
- Distancia de alcance: 2 cm - 350 cm
- Resolución: 0,3 cm
- Ciclo de salida: 50 ms
El sensor detecta objetos emitiendo una breve ráfaga ultrasónica y luego escucha el eco. Bajo el control de un microcontrolador anfitrión, el sensor emite una breve explosión de 40 kHz. Esta explosión se aventura o viaja por el aire golpea un artículo y luego rebota una vez más hacia el sensor.
El sensor proporciona un pulso de salida al host que terminará cuando se detecte el eco, por lo tanto, el ancho de un pulso al siguiente se toma en el cálculo mediante un programa para proporcionar resultados en una distancia del objeto.
Ahora que ha entendido las aplicaciones y el concepto básico de la detección ultrasónica si tiene alguna duda sobre este tema o sobre el eléctrico y controlador de nivel de líquido sin contacto deje la sección de comentarios a continuación.