La publicación explica un circuito que controla un motor de pozo sumergible operando sus botones rojo (Inicio) y verde (Parar), en respuesta a condiciones de agua de nivel bajo y alto, y también en una condición en la que el motor puede experimentar una situación de funcionamiento en seco. . La idea fue solicitada por el Sr. Vamsi.
Controlador automático de arranque / parada para contactor Borewell
Hola señor, soy un aficionado a la electrónica y un espectador habitual de nuestro blog, también un gran admirador de U señor ... he aprendido mucho de USTED. y MUCHAS GRACIAS SEÑOR ...
Señor, puede sugerirme, necesito el diseño de circuito del controlador de desbordamiento de agua completamente automático con circuito protector de funcionamiento en seco con indicadores de nivel.
los circuito necesario para el arrancador del pozo como en general, todos los arrancadores de pozo tendrán un pulsador VERDE y uno ROJO. manualmente pondremos en marcha el motor pulsando el VERDE durante 1 seg. y 1 seg. para apagarlo de la misma manera, el diseño que necesito es que el controlador funcione con relé dual (2 relés individuales) uno es para iniciar el bobinado.
es decir, el relé1 se activa durante 1 segundo. para ARRANCAR el motor y el otro Relay2 es para PARAR el motor se activa durante 1 seg. respectivamente y lo principal es que no podemos dejar caer sensores tan largos al nivel del suelo de los pozos profundos
Entonces, todo lo que necesito es en caso de que haya menos agua en el pozo de perforación, el sensor en el OHT está conectado a la tubería de agua superior que cae en el tanque, los sensores deben activar y energizar el Relay2 que a su vez apaga el motor si descargas de agua muy bajas. el agua que sale de la tubería tomará al menos 15 segundos. por lo tanto, será necesario un retardo de tiempo de encendido durante al menos 20 segundos (el relé 1 se activa y espera la descarga de agua hasta el tiempo mencionado).
Ahora el motor debería funcionar en estas condiciones:
1.Cuando el nivel de agua es bajo en OHT, el relé1 se energiza durante 1 segundo y enciende el motor.
2 El relé 2 debería activarse en dos condiciones: a) cuando el agua llena en OHT se activa durante 1 segundo. apagando el motor, yb) cuando el pozo de perforación FUNCIONA EN SECO, el tiempo se retrasa por lo menos durante 20 segundos y activa el relé 2 durante 1 segundo para apagar el motor.
El circuito debe funcionar en 12v dc. y también si es posible necesitará un pulsador RESET, cuando el agua en el OHT suponga la mitad del depósito, si necesitamos llenar el depósito, el motor debe arrancar pulsando el botón RESET.
Esta es mi breve explicación. Intenté mucho para este diseño de circuito deseado. pero no soy tan experto para decirlo pero tengo conocimientos técnicos, lógicos y básicos en este campo. Espero que entiendas mi solicitud. Por favor, haga lo necesario, señor, esperando su valiosa respuesta. Para publicar el diagrama del circuito, mi ID: login2vamsi183@gmail.com
Gracias y saludos
Vamsi Krishna
El diseño
En un par de mis artículos anteriores, hablé sobre un circuito similar con respecto a un circuito controlador de bomba sumergible semiautomática, sin embargo, el diseño utilizó un sondas metálicas sensibles a la humedad para la detección y activación.
El diseño actual se basa en una operación de interruptor de flotador basada en lengüeta / imán, que no solo hace que las operaciones sean más fáciles sino también mucho más confiables.
El circuito controlador de arranque de motor de pozo de pozo sumergible propuesto puede entenderse consultando el siguiente diagrama:
Diagrama de circuito

El diagrama de arriba muestra una configuración muy sencilla usando un par de etapas monoestables IC 555 idénticas.
La etapa IC2 forma el circuito de arranque de la bomba sumergible, mientras que la etapa IC2 está posicionada para detener el interruptor de la bomba.
Ambos circuitos funcionan con interruptores de láminas ( interruptor de flotador ) que se pueden ver colocados dentro del tanque superior, uno en la parte inferior y el otro en la parte superior del tanque.
La lengüeta inferior se cierra cuando el nivel del agua está cerca del umbral inferior y en paralelo al interruptor de lengüeta, mientras que el interruptor de lengüeta superior se cierra cuando el nivel del agua alcanza el nivel donde se instaló.
Suponiendo que el nivel del agua está cerca del interruptor de lengüeta inferior, el interruptor de lengüeta se cierra y activa la etapa IC1, que a su vez hace clic momentáneamente en el relé asociado.
El relé está conectado a través del botón de ARRANQUE de la bomba sumergible, el motor se enciende y comienza a bombear agua al tanque superior.
El nivel del agua en el OHT ahora comienza a subir, y cuando llega cerca de la lengüeta # 2 del interruptor de lengüeta superior, se cierra activando el relé IC2 por un momento activando el interruptor de PARADA del motor. El motor ahora se detiene y detiene el bombeo de agua dentro del OHT.
Protección de funcionamiento en seco del motor
Como se solicita, el circuito de PARADA también debe ser señalizado en caso de que se detecte un funcionamiento en seco del motor.
En ausencia de agua para bombear, el motor puede estar sujeto a una situación de 'funcionamiento en seco' que a su vez podría calentar el motor a niveles peligrosos.
Por lo tanto, se puede introducir un sensor de calor simple para detectar el aumento de calor del motor de la bomba y señalar la etapa IC1 para que el botón STOP se active instantáneamente a tiempo y el motor no se queme.
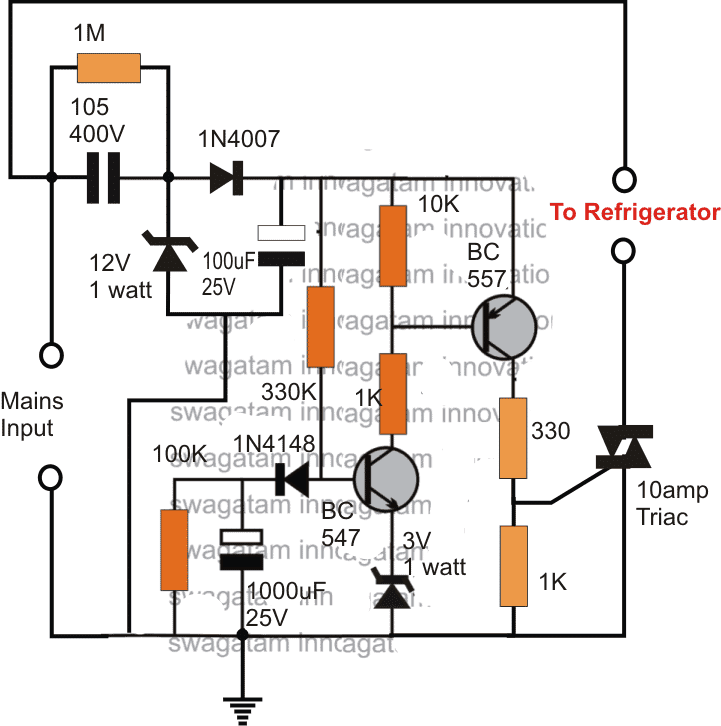
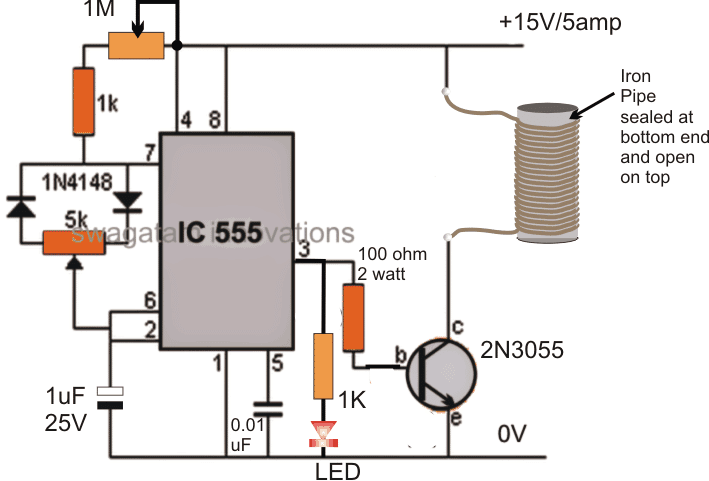
A continuación se puede ver un circuito sensor de calor simple pero muy efectivo. Asegura la protección vital contra el funcionamiento en seco del motor del pozo y también facilita la acción externamente sin

Usando 3 amplificadores operacionales de IC LM324
El circuito está configurado alrededor de tres amplificadores operacionales (LM324 o tres circuitos integrados 741 separados), donde A2 forma el sensor de temperatura a través de D1.
D1, que es un diodo 1N4148, se usa como un sensor de calor efectivo y se supone que debe pegarse al cuerpo del motor para la detección.
P1 está configurado de tal manera que cuando el motor tiende a calentarse, la salida de A3 se vuelve lo suficientemente alta como para activar el transistor opto en conducción, por lo tanto, en caso de que un motor pase por una situación de funcionamiento en seco y comience a calentarse, D1 detecta que esto activa el conectado optoacoplador (4n35).
Ahora que el colector del optoacoplador está conectado con el pin # 2 de IC2 (relé de PARADA), el IC2 responde a esto y rápidamente inicia el relé y detiene el motor.
El motor se enfría gradualmente, lo que hace que el optoacoplador también se apague y la situación vuelva a la normalidad y al estado original.
El circuito START / STOP basado en IC 555 explicado anteriormente fue construido con éxito por uno de los ávidos lectores de este blog, el Sr. Chandan. Los valores probados de los componentes R y C como se muestran en las figuras son para producir un retardo de encendido de 2 segundos para los interruptores de arranque / parada relevantes. Los valores fueron sugeridos por el Sr. Chandan.
Artículo anterior: Hacer agua potable gratuita a partir del agua de mar Siguiente: Haga este sistema de lavadora simple