En esta publicación, aprenderemos sobre un circuito simple que permite una función de ajuste manual para la sincronización de la chispa del CDI de una motocicleta, ya sea para lograr un encendido avanzado, un encendido retardado o simplemente un encendido temporizado normal.
Después de un estudio exhaustivo sobre el tema, aparentemente tuve éxito en el diseño de este circuito que puede ser utilizado por cualquier motociclista para lograr una mayor velocidad y eficiencia de combustible ajustando el tiempo de encendido del motor del vehículo según lo deseado, dependiendo de su velocidad instantánea.
Sincronización de la chispa de encendido
Todos sabemos que la sincronización de la chispa de encendido generada dentro del motor de un vehículo es crucial en términos de la eficiencia del combustible, la vida útil del motor y la velocidad del vehículo, las chispas CDI mal sincronizadas pueden producir un vehículo que funciona mal y viceversa.
El tiempo de encendido recomendado para la chispa dentro de la cámara de combustión es cuando el pistón está a unos 10 grados después de haber cruzado el punto TDC (punto muerto superior). La bobina captadora está ajustada para corresponder a esto y cada vez que el pistón llega justo antes del TDC, la bobina captadora activa la bobina CDI para disparar la chispa, denominada BTDC (antes del punto muerto superior.
La combustión realizada con el proceso anterior generalmente produce un buen funcionamiento del motor y emisiones.
Sin embargo, lo anterior funciona bien solo mientras el motor esté funcionando a una velocidad promedio recomendada, pero para las motocicletas que están diseñadas para alcanzar velocidades extraordinarias, la idea anterior comienza a funcionar mal y la motocicleta no puede alcanzar las altas velocidades especificadas.
Sincronización del tiempo de chispa con distintas velocidades
Esto sucede porque a velocidades más altas, el pistón se mueve mucho más rápido de lo que la chispa de encendido puede anticipar. Aunque el circuito CDI inicia el disparo correctamente e intenta complementar la posición del pistón, para cuando la chispa puede encenderse en la bujía, el pistón ya se ha adelantado mucho al TDC, lo que provoca un escenario de combustión no deseado para el motor. Esto, a su vez, da como resultado ineficiencias que impiden que el motor alcance los límites de velocidad más altos especificados.
Por lo tanto, para corregir el tiempo de encendido del encendido, debemos avanzar ligeramente el encendido de la bujía ordenando un gatillo ligeramente avanzado para el circuito CDI, y para velocidades más lentas, esto simplemente debe invertirse y el encendido debe retrasarse preferiblemente ligeramente para permitiendo una eficiencia óptima para el motor del vehículo.
Discutiremos todos estos parámetros de manera muy elaborada en algún otro artículo, en este momento nos gustaría analizar el método que nos permitiría lograr un ajuste manual de la sincronización de la chispa de encendido para avanzar, retardar o trabajar normalmente según la velocidad. de la moto.
El tiempo de recogida puede no ser lo suficientemente fiable
De la discusión anterior, podemos concluir que el gatillo de la bobina de captación no solo se vuelve confiable para motocicletas de alta velocidad, y algunos medios para hacer avanzar la señal de captación se vuelven imperativos.
Normalmente esto se hace usando microcontroladores, he intentado lograr lo mismo usando componentes ordinarios, aparentemente parece ser un diseño lógicamente factible, aunque solo una prueba práctica puede confirmar su usabilidad.

Diseño de un procesador de retardo avanzado CDI electrónico
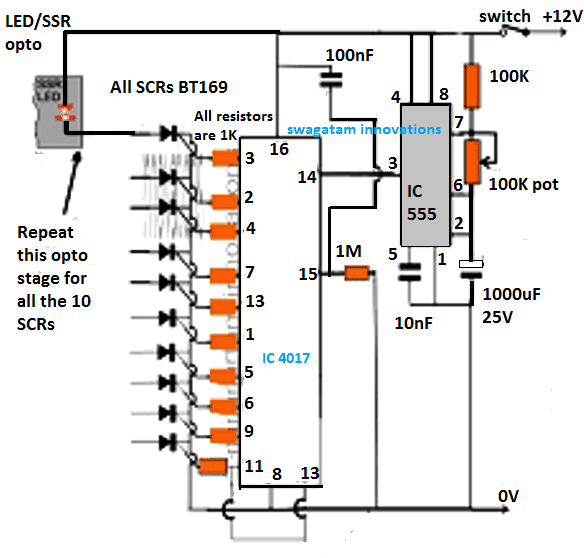
En referencia al diseño anterior del circuito de temporizador de retardo y avance de chispa CDI ajustable propuesto, podemos ver un circuito IC 555 ordinario y un circuito IC 4017 que están montados en un estándar ' Circuito de luces LED de seguimiento ' modo.
El IC 555 está configurado como un astable que produce y alimenta pulsos de reloj al pin # 14 del IC 4017 que a su vez responde a estos pulsos y produce una lógica alta 'saltando' a través de sus pines de salida desde el pin # 3 al pin # 11 y luego de vuelta al pin # 3.
Se pueden ver un par de BJT NPN / PNP en el lado izquierdo del diagrama, estos están colocados para restablecer los dos circuitos integrados en respuesta a las señales recibidas de la bobina captadora de la motocicleta.
La señal de la bobina captadora se envía a la base del NPN que solicita a los circuitos integrados que reinicien y reinicien las oscilaciones, cada vez que la bobina captadora detecta una revolución completada por el volante asociado.
Optimización de la frecuencia IC 555
Ahora, la frecuencia del IC 555 se ajusta de manera que cuando la bobina captadora detecta una revolución y restablece los circuitos integrados, el 555 IC puede producir entre 9 y 10 pulsos, lo que permite que el IC 4017 genere un alto hasta su pin # 11 o al menos hasta su pinout # 9.
Lo anterior se puede configurar para revoluciones correspondientes a la velocidad de ralentí de la motocicleta.
Significa que durante las velocidades de inactividad, las señales de la bobina de captación permitirían que las salidas 4017 viajen a través de casi todos los pines hasta que se restablezcan al pin n. ° 3.
Sin embargo, ahora intentemos simular lo que sucedería a velocidades más altas.
Respuesta a mayor velocidad del vehículo
A velocidades más altas, las señales de captación producirían señales más rápidas que la configuración normal, y eso a su vez evitaría que el IC 555 genere los 10 pulsos estipulados, por lo que ahora podría generar alrededor de 7 pulsos o 6 pulsos a una dada una mayor velocidad del vehículo.
Esto, a su vez, evitaría que el IC 4017 permita que toda su salida sea alta, en cambio, ahora podría conducir solo hasta el pin # 6 o el pin # 5, después de lo cual la pastilla forzaría al IC a reiniciarse.
División del volante en 10 divisiones de avance / retraso
A partir de la discusión anterior, podemos simular una situación en la que, a velocidades de ralentí, las salidas del 4017 IC están dividiendo la rotación del volante de captación en 10 divisiones, en la que las 3 o 4 señales de pinout inferiores se pueden considerar correspondientes a las señales que pueden ser que ocurre justo antes de la señal de activación de la bobina de captación real, de manera similar, las lógicas altas de pinout en el pin # 2, 4, 7 podrían simularse para ser las señales que aparecen justo después de que la activación de la bobina de captación real haya pasado.
Por lo tanto, podemos asumir que las señales en los pines inferiores del IC 4017 están 'avanzando' las señales de captación reales.
Además, dado que el restablecimiento de la pastilla empuja el IC 4017 hacia arriba a su pin # 3, se puede suponer que este pinout corresponde al disparador 'recomendado' normal de la pastilla ... mientras que los pinouts que siguen al pin # 3, es decir se podría suponer que los pines2,4,7 son las señales correspondientes a las señales tardías o las señales 'retardadas', con respecto a los activadores de activación reales.
Cómo configurar el circuito
Para esto primero necesitamos saber el tiempo requerido por la señal de captación para generar cada pulso alterno.
Suponga que lo registra en alrededor de 100 milisegundos (un valor arbitrario), esto implicaría que el 555 IC necesita producir pulsos en su pin # 3 a una velocidad de 100/9 = 11,11 ms.
Una vez que se establece esto, podemos asumir aproximadamente que las salidas del 4017 producen una alta lógica en todas sus salidas que gradualmente 'retroceden' a medida que las señales de captación se vuelven cada vez más rápidas en respuesta a la velocidad del vehículo.
Esto induciría una lógica 'alta' en retroceso en los pines inferiores del IC 4017, por lo tanto, a velocidades más altas, el ciclista tendría la opción de recurrir manualmente a los conjuntos de pines inferiores para activar la bobina CDI, como se muestra en el diagrama (ver opciones del interruptor selector).
En la figura podemos ver un interruptor selector que se puede usar para seleccionar los disparadores de pinout del IC 4017 IC para disparar la bobina CDI.
Como se explicó anteriormente, el conjunto inferior de lógicas altas de pinout de retroceso una vez seleccionado, permitiría un disparo avanzado de la bobina CDI y, por lo tanto, permitiría al ciclista lograr un disparo avanzado automático autoajustable de la bobina CDI; sin embargo, esto debe seleccionarse solo cuando el el vehículo está funcionando muy por encima de la velocidad normal recomendada.
De manera idéntica, si el conductor contempla una velocidad más baja para el vehículo, puede alternar el interruptor para seleccionar la opción de sincronización 'retardada', disponible en los pines que están justo después del pin # 3 del IC 4017.
Durante las velocidades normales recomendadas, el ciclista puede optar por el pin n. ° 3 como salida de activación para el CDI, lo que permitiría al vehículo disfrutar de un viaje eficiente a las velocidades normales dadas.
La teoría del tiempo de avance / retraso anterior se inspiró en la explicación que se expresa en el siguiente video:
El enlace del video original que se puede ver en Youtube se muestra a continuación:
Cómo automatizar el concepto anterior
En la siguiente sección, aprendemos el método para actualizar el concepto anterior a una versión automática usando un tacómetro y etapas de circuito opamp. La idea fue solicitada por el Sr. Mike y diseñada por el Sr. Abu-Hafss.
Especificaciones técnicas
¡Saludos!
Cosas interesantes aquí, actualmente estoy trazando trazos en CAD y me gustaría grabar esto en alguna PCB, pero prefiero que la selección de estándar avanzado o retardado quede en la electrónica ...
Soy un poco nuevo en esto, pero siento que tengo una buena comprensión de los conceptos en juego ...
mi pregunta es, ¿tiene algún artículo sobre la automatización de la selección avanzada en función de las RPM del motor? Ah, ¿y una lista de piezas de los distintos componentes sería espectacular?
Gracias Mike
El diseño, de Abu-Hafss
Hola Swagatam
Refiriéndose a su artículo sobre CDI de chispa de encendido de avance y retardo para mejorar la eficiencia de la motocicleta de alta velocidad , Me gustaría comentar que todavía no me he encontrado con ninguna situación en la que se requiera RETARDACIÓN (o más precisamente DEMORA) de disparo de las chispas. Como mencionó, la mayoría de las bicicletas (bicicletas de carreras) no funcionan a altas RPM (generalmente por encima de 10,000 RPM), por lo que se requiere un disparo anticipado de chispas. Tenía casi la misma idea en mi mente, pero no pude probar físicamente.
A continuación se muestra mi adición propuesta a su circuito:
Para automatizar el cambio de chispa de disparo entre NORMAL y ADVANCE, un circuito tacómetro se puede utilizar con algunos componentes más. Se quita el voltímetro del circuito del tacómetro y la salida se alimenta al pin # 2 del IC LM741 que se usa como comparador. Se asigna un voltaje de referencia de 10V en el pin # 3. El circuito del tacómetro está diseñado para dar una salida de 1 V contra 1000 RPM, por lo que 10 V se refiere a 10,000 RPM. Cuando las RPM son más de 10,000, el pin # 2 tiene más de 10 V y, por lo tanto, la salida de 741 baja (cero).
Esta salida está conectada a la base de T2, por lo tanto, la salida baja conmuta en T2. Si las RPM están por debajo de 10,000, la salida aumenta y, por lo tanto, T2 se apaga. Al mismo tiempo, T4, que está configurado como inversor de señal, invierte la salida a baja y la misma se conecta a la base de T3, por lo que T3 se enciende.
Saludos
Abu-Hafss

Previous: Cómo obtener energía libre de un péndulo Siguiente artículo: Hacer un circuito regulador de voltaje de 3.3V, 5V con diodos y transistores