En esta publicación vamos a construir un robot para automóvil que se puede controlar mediante un joystick en un enlace de comunicación inalámbrica de 2.4 GHz. El proyecto propuesto no solo se realiza como un automóvil RC, sino que puede agregar sus proyectos, como una cámara de vigilancia, etc.en el automóvil.
Visión general
El proyecto se divide en dos partes: el mando a distancia y el receptor.
El coche o la base, donde colocamos todos los componentes de nuestro receptor puede ser de tracción a tres ruedas o tracción a las cuatro ruedas.
Si desea más estabilidad para el automóvil base o si desea conducir el automóvil en una superficie irregular, como al aire libre, se recomienda una base para automóvil con 4 ruedas.
También puede usar un automóvil base con tracción en las 3 ruedas que le brindan una mayor movilidad al girar, pero puede proporcionar menos estabilidad que la tracción en las 4 ruedas.
Un coche con 4 ruedas pero, 2 motores también es factible.
El control remoto se puede alimentar con una batería de 9V y el receptor se puede alimentar con una batería de plomo-ácido sellada de 12V, 1.3 AH, que ocupa menos espacio que la batería de 12V, 7AH y también es ideal para tales aplicaciones peripatéticas.
La comunicación de 2,4 GHz entre se establece mediante el módulo NRF24L01 que puede transmitir señales a más de 30 a 100 metros dependiendo de los obstáculos entre dos módulos NRF24L01.
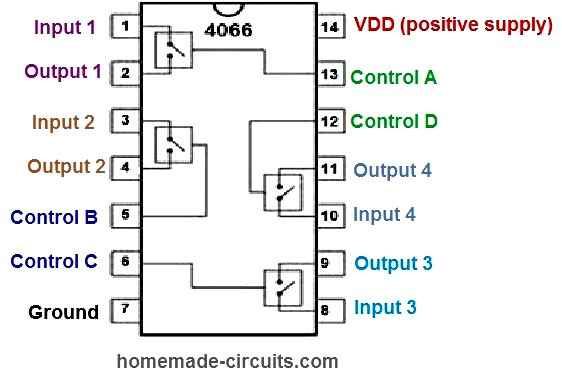
Ilustración del módulo NRF24L01:

Funciona con 3.3V y 5V puede apagar el módulo, por lo que se debe tener cuidado y funciona con el protocolo de comunicación SPI. La configuración de los pines se muestra en la imagen de arriba.
El mando a distancia:
El control remoto consta de Arduino (se recomienda Arduino nano / pro-mini), módulo NRF24L01, un joystick y una fuente de alimentación de batería. Intente empacarlos en una pequeña caja de basura, que será más fácil de manejar.
Diagrama esquemático para control remoto:

Las conexiones de los pines para el módulo NRF24L01 y el joystick se proporcionan en el diagrama; si nota algún problema, consulte la tabla de conexiones de pines que se proporciona.
Al mover el joystick hacia adelante (ARRIBA), hacia atrás (Abajo), derecha e izquierda, el automóvil se mueve en consecuencia.

Tenga en cuenta que todas las conexiones de cables están en el lado izquierdo, este es el punto de referencia y ahora puede mover el joystick a mover el auto .
Al presionar el joystick en el eje Z, puede controlar la luz LED del automóvil.
Programa para el control remoto:
|_+_|
Eso concluye el Remote.
Ahora echemos un vistazo al receptor.
El circuito receptor se colocará en el coche base. Si tiene alguna idea para agregar su proyecto en esta base móvil, planifique la geometría correctamente para colocar el receptor y su proyecto de manera que no se quede sin espacio.
El receptor consta de Arduino, módulo controlador de motor de CC de doble puente H L298N, LED blanco que se colocará en la parte delantera del automóvil, módulo NRF24L01 y batería de 12 V, 1.3 AH. Los motores pueden venir con el coche base.
Diagrama esquemático del receptor:

Tenga en cuenta que la conexión entre la placa Arduino y NRF24L01 NO se muestra en el diagrama anterior para evitar confusión en el cableado. Consulte el esquema del control remoto.
La placa Arduino estará alimentada por el módulo L298N que tiene incorporado un regulador de 5V.
El LED blanco puede colocarse como luz frontal o puede personalizar este pin según sus necesidades, al presionar el joystick, el pin # 7 se pone alto y presionando el joystick de nuevo hará que el pin baje.

Preste atención a los motores del lado izquierdo y derecho especificados en el diagrama esquemático del receptor.
Programa para el receptor:
|_+_|
Eso concluye el receptor.
Después de completar el proyecto, si el automóvil se mueve en la dirección incorrecta, simplemente invierta la polaridad del motor.
Si su automóvil base tiene tracción a las ruedas de 4 motores, conecte los motores izquierdos en paralelo con la misma polaridad, haga lo mismo con los motores del lado derecho y conéctelos al controlador L298N.
Si tiene alguna pregunta sobre este automóvil RC de 2.4 GHz controlado por joystick que usa Arduino, no dude en expresarlo en la sección de comentarios, puede recibir una respuesta rápida.
Artículo anterior: Explicación del módulo de controlador de motor de CC L298N Siguiente artículo: Circuito de medidor de flujo de agua digital simple usando Arduino