Este útil circuito de tacómetro analógico liviano se ha desarrollado para facilitar a los mecánicos de automóviles o de mantenimiento de automóviles el ajuste preciso de las RPM del sistema de encendido de un automóvil para obtener la máxima eficiencia. El circuito propuesto es en realidad un diseño combinado de un tachometer y un medidor de permanencia.
Solicitud
El circuito del tacómetro analógico se puede aplicar para analizar la sincronización del encendido a varias RPM, junto con una lámpara de sincronización. Cuando el circuito se utiliza en forma de medidor de permanencia, se puede usar para leer el ángulo en el que se enciende el pulso de encendido y, por lo tanto, puede proporcionar la información necesaria al mecánico de automóviles con respecto al ajuste de sincronización del circuito CDI.
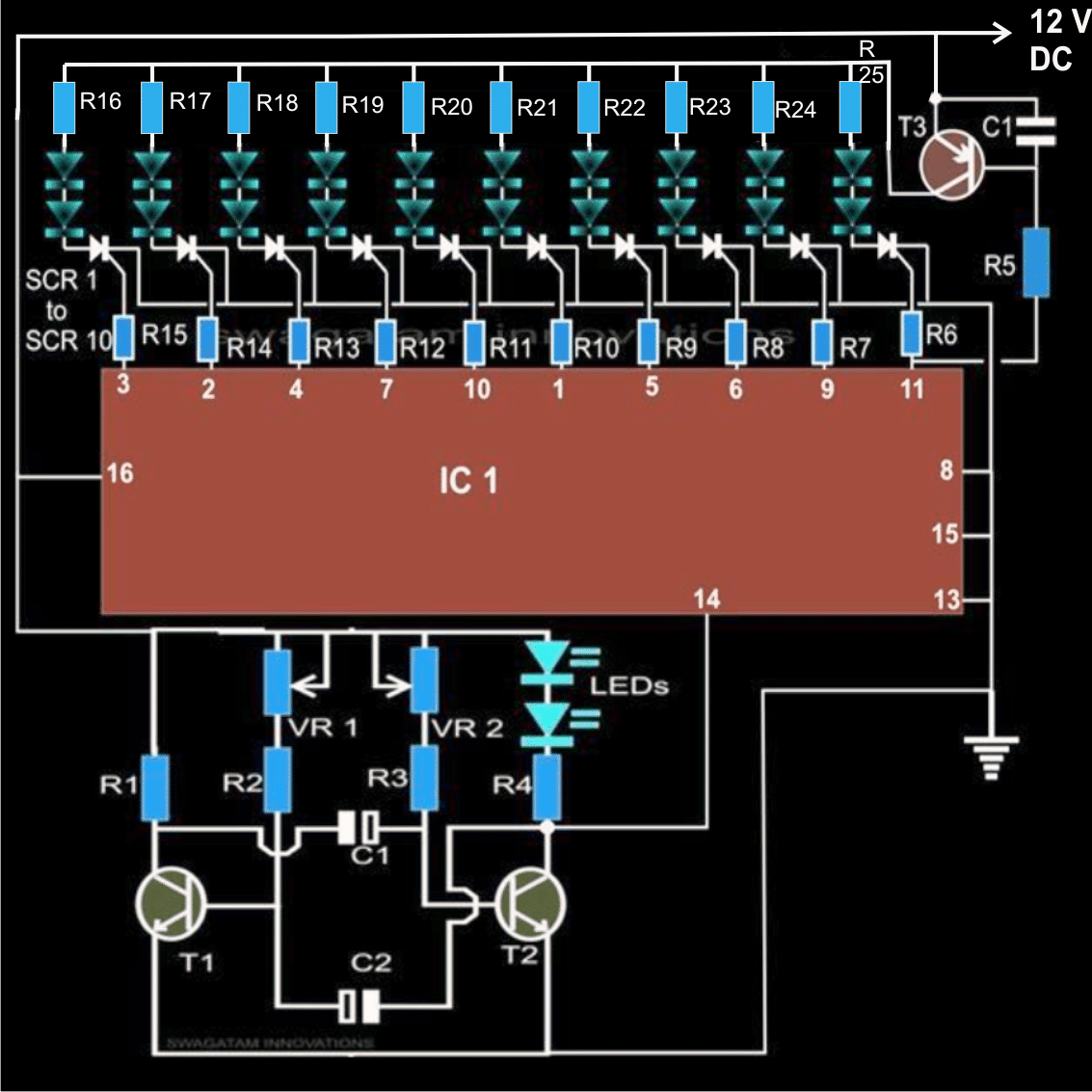
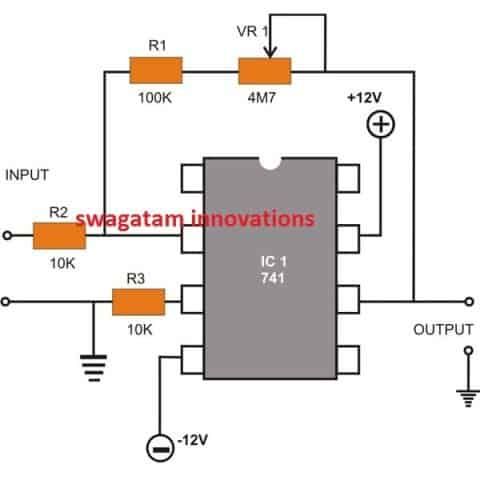
La configuración completa se muestra en la figura siguiente y está diseñada para automóviles o automóviles con sistema de conexión a tierra negativo, que tienen la mayoría de los automóviles contemporáneos.
La idea también se puede adaptar para vehículos de tierra positiva conectando todos los diodos y condensadores electrolíticos con polaridad inversa y reemplazando los transistores PNP con NPN y viceversa. El circuito se alimenta a través de la propia batería del automóvil. El funcionamiento del circuito se puede entender con los siguientes puntos:
Cómo funciona el circuito

Cambie los pines emisor / colector del T7 que está orientado incorrectamente en el diagrama
Los transistores T1 y T2 están equipados como un disparador Schmitt. Mientras no se detecte un pulso positivo en la entrada de la bobina captadora, T1 permanece apagado y T2 está encendido, lo que significa que T4 también está encendido. Esto provoca que se genere un voltaje positivo correspondiente al voltaje de suministro de la batería menos el voltaje del emisor de base T4 en el emisor T4.
Sin embargo, cuando se genera un pulso positivo desde la bobina captadora, T1 se activa y el gatillo Schmitt cambia en sentido contrario.
En este punto, T4 se apaga, lo que hace que el voltaje existente en su emisor sea cero. El voltaje promedio en el emisor T4 es como resultado proporcional a la relación del tiempo de conmutación ON / OFF de la bobina captadora, es decir, o en otras palabras, este valor de voltaje está determinado por el ángulo de permanencia.
Cuando el interruptor S1 está en la posición 'a', la corriente promedio a través del medidor también dependerá del ángulo de permanencia, por lo tanto, el medidor podría graduarse linealmente con respecto al ángulo de permanencia.
Cuando el interruptor está en la posición 'b', el circuito simplemente funciona como un tacómetro. C2 funciona como un diferenciador para los pulsos provenientes del colector T3 y la salida resultante se usa para activar una etapa monoestable construida alrededor de los transistores T5 y T6.
El monoestable genera una salida PWM constante, sin embargo, a medida que aumentan las RPM del motor, el ciclo de trabajo de los pulsos también aumenta. El voltaje promedio en el emisor T7, y por lo tanto la corriente promedio a través del medidor, ahora depende de la relación entre el período de 'pulso' y el de 'sin pulso'. Esto significa que a medida que las r.p.m. aumenta y el ancho de los pulsos se ensancha, la corriente a través del medidor también aumenta linealmente.
Cómo calibrar
El dispositivo se puede calibrar de la siguiente manera: Con S1 en la posición 'a', conecte la entrada R1 a la línea de tierra, luego ajuste P1 para obtener una desviación de escala completa del medidor. Esto se vuelve equivalente a un ángulo de permanencia de 360 ° y la escala podría calibrarse linealmente de 0 a 360 grados.
La escala del tacómetro debe calibrarse con escala completa para que corresponda a las r.p.m. óptimas más altas. Para la mayoría de aplicaciones, 8000 podría ser suficiente.
Si la herramienta se va a aplicar en motores de cuatro y seis cilindros, en ese caso, es posible que se necesiten un par de escalas, o que S1 deba ser sustituido por un interruptor de 3 polos y P2 deba replicarse para corresponder a una escala única para varias gamas de motores. Esto se debe a que un motor de seis cilindros genera proporcionalmente muchos más pulsos para un r.p.m. específico.
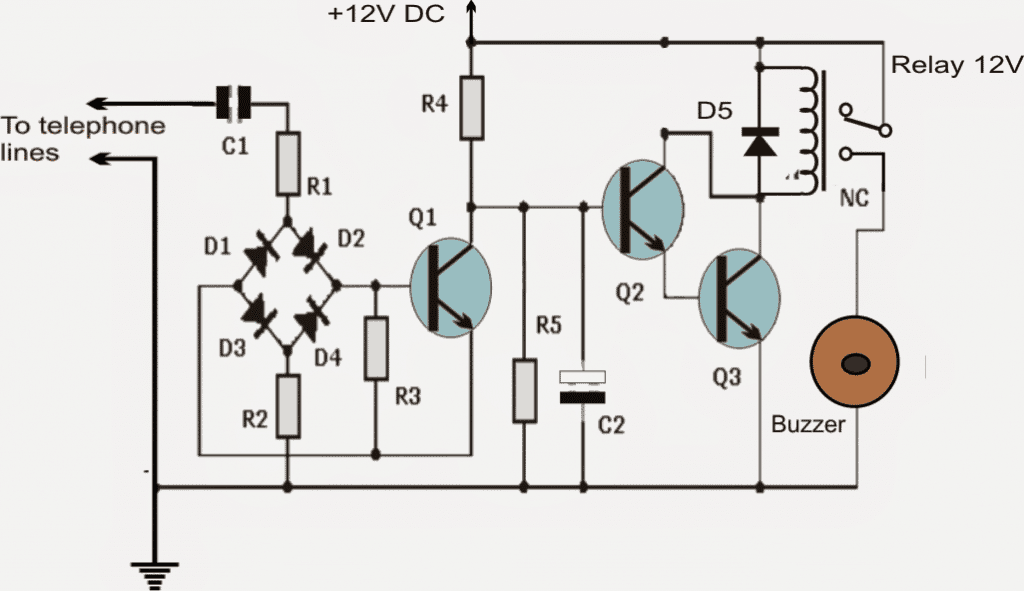
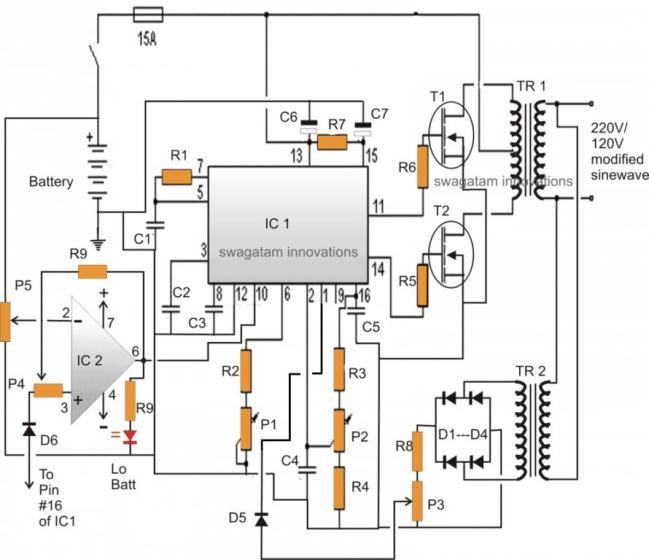
El dispositivo se puede calibrar con la ayuda del circuito puente / transformador básico que se muestra, que produce una forma de onda de 100 Hz.

La frecuencia de 100 Hz se vuelve equivalente a 3000 r.p.m. para un motor de cuatro cilindros y 2000 r.p.m. para un motor de seis cilindros. La salida de este circuito está conectada a la entrada del dispositivo de tacómetro analógico y P2 se ajusta para optimizar una desviación y lectura precisas en el medidor.
Artículo anterior: Circuito de control de luz estroboscópica de xenón Siguiente artículo: Circuito UPS de onda sinusoidal de 50 vatios