En esta publicación, discutimos algunos circuitos de protección de motores de CC de condiciones dañinas como situaciones de sobrevoltaje y bajo voltaje, sobrecorriente, sobrecarga, etc.
Muchos de los usuarios suelen experimentar fallas en los motores de CC, especialmente en lugares donde el motor relevante funciona durante muchas horas al día. Reemplazar las piezas del motor o el motor en sí después de una falla puede ser un asunto bastante costoso, algo que nadie aprecia.
Se me hizo una solicitud de uno de mis seguidores con respecto a la solución del problema anterior, escuchémoslo del señor Gbenga Oyebanji, alias Big Joe.
Especificaciones técnicas
'Al ver el daño que nuestra fuente de alimentación ha hecho a la mayoría de nuestros aparatos eléctricos, es necesario construir un módulo de protección para nuestros aparatos que los proteja contra las fluctuaciones de energía.
El objetivo del proyecto es diseñar y construir un módulo de protección para motores DC. Por tanto, los objetivos del proyecto son
• Diseñar y construir un módulo de protección contra sobretensión para motores DC con indicador (LED).
• Diseño y construcción de un módulo de protección de subtensión para motores DC con indicador (LED).
• Diseñar y construir un módulo de protección de temperatura para el motor (Termistor) con indicador (LED).
El circuito protege el motor de CC de sobretensión y subtensión. Se puede utilizar un relé para encender y apagar la carga (motor de 12 V CC). Se usa un comparador para detectar si es alto o bajo. La sobretensión debe ser de 14 V, mientras que la baja tensión debe ser de 10 V.
También debe construirse el circuito de rectificación y filtrado necesario.
Cuando se detecta alguna falla, deben aparecer las indicaciones necesarias.
Además, cuando el devanado de campo del motor está abierto, el circuito debe poder detectar esto y apagar el motor porque cuando el devanado de campo está abierto ya no hay flujo magnético dentro del motor y toda la potencia se alimenta directamente a la armadura. .
Esto hace que el motor funcione hasta que se averíe. (¿Espero estar en lo cierto?). Agradecería recibir pronto su respuesta.
Gracias Swagatam. Salud'
1) Diagrama de circuito del módulo de protección de voltaje del motor de CC
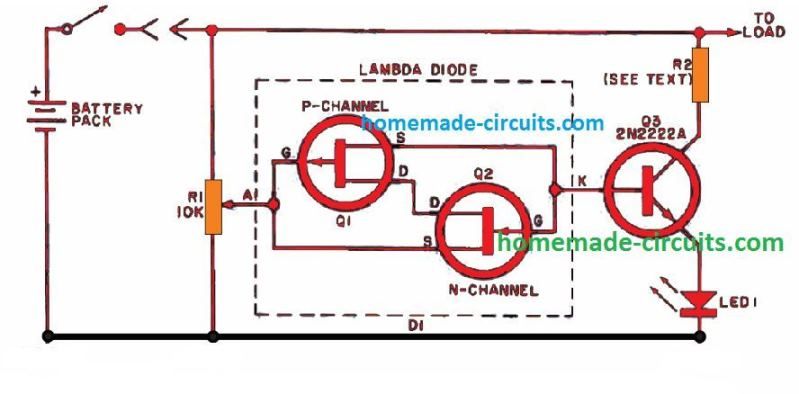
El siguiente corte de voltaje alto y bajo que discutí anteriormente en una de mis publicaciones, se adapta perfectamente a la aplicación anterior para proteger motores de CC de condiciones de alto y bajo voltaje.

La explicación completa del circuito se proporciona circuito de voltaje de corte por encima / por debajo
2) Circuito del módulo de protección contra sobrecalentamiento del motor de CC
El tercer problema que involucra el aumento de temperatura del motor se puede resolver integrando el siguiente circuito indicador de temperatura simple.
Este circuito también fue cubierto en una de mis publicaciones anteriores.

Es de suponer que el circuito protector de sobrecalentamiento anterior nunca permitirá que falle el devanado de campo, porque cualquier devanado se calentará primero antes de fusionarse. El circuito anterior apagará el motor si detecta un calentamiento anormal de la unidad y así evitará tal percance.
Se proporciona la lista completa de piezas y la explicación del circuito. AQUÍ
Cómo proteger el motor de sobrecorriente
La tercera idea a continuación analiza un diseño de circuito de controlador de sobrecarga de corriente de motor automático. La idea fue solicitada por el Sr. Ali.
Especificaciones técnicas
Necesito ayuda para completar mi proyecto. Este es un motor simple de 12 voltios que necesita protección cuando se sobrecarga.
Los datos se muestran y pueden ayudar a diseñarlo.
El circuito de protección contra sobrecarga debe tener componentes mínimos debido a que no hay suficiente espacio para agregarlo.
El voltaje de entrada es variable de 11 voltios a 13 voltios debido a la longitud del cableado, pero la sobrecarga de corte debe ocurrir cuando V1 - V2 => 0,7 voltios.
Por favor, mire el diagrama de sobrecarga adjunto que debería cortarse si los amperios aumentan más de 0,7 amperios. ¿Cuál es tu idea sobre este diagrama? ¿Es un circuito complicado o es necesario agregar algunos componentes?



Análisis de circuitos
Con referencia a los esquemas de control de corriente del motor de 12v dibujados anteriormente, el concepto parece ser correcto, sin embargo, la implementación del circuito, especialmente en el segundo diagrama, parece incorrecta.
Analicemos los diagramas uno por uno:
El primer diagrama explica los cálculos básicos de la etapa de control de corriente usando un opamp y algunos componentes pasivos, y se ve muy bien.
Como se indica en el diagrama, siempre que V1 - V2 sea menor a 0.7V, se supone que la salida del opamp es cero, y en el momento en que alcanza por encima de 0.7V, se supone que la salida es alta, aunque esto funcionaría con un transistor PNP en la salida, no con un NPN, .... de todos modos sigamos adelante.
Aquí el 0.7 V es con referencia al diodo conectado a una de las entradas del opamp, y la idea es simplemente asegurar que el voltaje en este pin exceda el límite de 0.7V para que este potencial de pinout cruce el otro pin de entrada complementario de el amplificador operacional resulta en un disparador de apagado que se generará para el transistor del controlador del motor adjunto (un transistor NPN como se prefiere en el diseño)
Sin embargo, en el segundo diagrama, esta condición no se ejecutará, de hecho, el circuito no responderá en absoluto, veamos por qué.
Errores en el segundo esquema
En el segundo diagrama, cuando se enciende la alimentación, ambos pines de entrada conectados a través de la resistencia de 0,1 ohmios estarán sujetos a casi la misma cantidad de voltaje, pero como el pin no inversor tiene un diodo de caída, recibirá un potencial que puede ser 0,7 V más bajo que el pin2 inversor del IC.
Esto dará como resultado que la entrada (+) obtenga un voltaje un poco más bajo que el pin (-) del IC, que a su vez producirá un potencial cero en el pin 6 del IC justo al inicio. Con cero voltios en la salida, el NPN conectado no podrá iniciarse y el motor permanecerá APAGADO.
Con el motor apagado, no habrá corriente absorbida por el circuito y no se generará ninguna diferencia de potencial a través de la resistencia de detección. Por lo tanto, el circuito permanecerá inactivo sin que ocurra nada.
Hay otro error en el segundo diagrama, el motor en cuestión deberá estar conectado a través del colector y el positivo del transistor para hacer que el circuito sea efectivo, un relé puede causar una conmutación abrupta o vibración y, por lo tanto, no es necesario.
Si se hace referencia a un relé, entonces el segundo diagrama podría corregirse y modificarse de la siguiente manera:

En el diagrama anterior, los pines de entrada del amplificador operacional se pueden ver intercambiados para que el amplificador operacional pueda producir una salida ALTA al inicio y permitir que el motor se active. En caso de que el motor comience a consumir una corriente alta debido a una sobrecarga, la resistencia de detección de corriente hará que se desarrolle un potencial negativo más alto en el pin3, lo que reducirá el potencial del pin3 que la referencia 0,7 V en el pin2.
Esto, a su vez, revertirá la salida del amplificador operacional a cero voltios apagando el relé y el motor, protegiendo así el motor de situaciones de sobrecorriente y sobrecarga adicionales.
Diseño de protección del tercer motor
Refiriéndose al tercer diagrama tan pronto como se encienda la alimentación, el pin2 estará sujeto a un potencial 0,7 V menor que el pin3 del IC, lo que obligará a la salida a subir al inicio.
Con la salida alta hará que el motor arranque y gane impulso, y en caso de que el motor intente consumir una corriente mayor que el valor especificado, se generará una diferencia de potencial equivalente en la resistencia de 0.1 ohm, ahora que comienza este potencial. el pin3 ascendente comenzará a experimentar un potencial descendente, y cuando cae por debajo del potencial del pin2, la salida volverá rápidamente a cero, cortando la unidad base para el transistor y apagando el motor instantáneamente.
Con el motor apagado durante ese instante, el potencial a través de los pines tenderá a normalizarse y se restablecerá al estado original, lo que a su vez encenderá el motor y la situación seguirá autoajustable mediante un encendido / apagado rápido. del transistor conductor, manteniendo un correcto control de corriente sobre el motor.
Por qué se agrega LED a la salida del amplificador operacional
El LED introducido en la salida del amplificador operacional puede parecer básicamente un indicador ordinario para indicar el corte de protección contra sobrecarga del motor.
Sin embargo, alternativamente realiza otra función crucial de prohibir que la salida del amplificador operacional de fuga o compensación encienda el transistor permanentemente.
Se puede esperar alrededor de 1 a 2 V como voltaje de compensación de cualquier IC 741, lo cual es suficiente para hacer que el transistor de salida permanezca encendido y hacer que la conmutación de entrada no tenga sentido. El LED bloquea efectivamente la fuga o el desplazamiento del amplificador operacional y permite que el transistor y la carga cambien correctamente según los cambios de diferencial de entrada.
Cálculo de la resistencia de detección
La resistencia de detección se puede calcular de la siguiente manera:
R = 0,7 / corriente
Aquí, como se especifica para un límite de corriente de 0,7 amperios para el motor, el valor de la resistencia R del sensor de corriente debe ser
R = 0,7 / 0,7 = 1 ohmio
Anterior: Cómo obtener energía gratis del alternador y la batería Siguiente: Cómo funcionan los circuitos de fuente de alimentación conmutada (SMPS)