En esta parte del artículo aprendemos sobre un método innovador para convertir el mecanismo de presión del pedal en vehículos eléctricos en una señal eléctrica correspondientemente variable, que se puede utilizar adicionalmente para procesar el control de velocidad del vehículo.
El concepto explicado funcionará como un acelerador electrónico, que aumentará la velocidad del vehículo de forma lineal cuando se pise gradualmente el pedal, y viceversa, utilizando tecnología PWM.
La idea fue solicitada por el señor Lokesh Maini
Especificaciones técnicas
Soy un mecánico, actualmente estoy trabajando en un vehículo eléctrico y quiero controlar la velocidad de mi motor usando el pedal. No voy a conseguir un controlador para mi motor, por favor ayúdame a construir el mío propio.
agradecido
Las especificaciones del motor son de 36 voltios, 43 amperios y un motor de CC cepillado de 1,5 hp.
El diseño mecánico
Una versión electrónica de un acelerador de pedal requerirá principalmente un mecanismo para convertir primero la presión mecánica del pedal en una señal eléctrica correspondientemente variable, de modo que esta señal pueda procesarse a través de una etapa de procesador de señal para la conversión deseada en un control de velocidad práctico del vehículo.
Se pueden probar muchos conceptos, como usar un sensor de carga piezoeléctrico, un sensor de carga capacitivo, un sensor de resonancia, etc. En este artículo aprenderemos un método mucho más simple ideado por mí que incorpora un conjunto LED / LDR para lograr lo mismo .

En la disposición electromecánica que se muestra en la figura anterior podemos ver los siguientes componentes integrados:
Un pequeño engranaje unido con un mecanismo de tornillo.
La cabeza del tornillo tiene una superficie reflectora mate blanca.
Un conjunto de LED / LDR colocado delante de la cabeza del tornillo.
Cómo funciona el mecanismo propuesto.
El engranaje que se muestra en la figura anterior debe bloquearse con otro engranaje que tenga una relación que puede ser 10 veces mayor que este engranaje.
El engranaje más grande debe configurarse con el mecanismo del pedal de modo que inicie un movimiento de rotación en respuesta a la presión del pedal.
La respuesta de rotación de los engranajes producirá a su vez un movimiento hacia adelante de la cabeza del tornillo a través de la cámara donde se encuentra el conjunto de LED / LDR.
El proceso provocará que el LDR reciba una cantidad proporcionalmente variable de luz reflejada del LED.
Estos datos variables (en forma de resistencia variable) correspondientes a la presión del pedal pueden luego alimentarse a un circuito procesador de señales para hacer cumplir el control de velocidad previsto del vehículo particular.
En el próxima publicación aprenderemos la etapa del procesador de señal usando la técnica PWM.
En el sección anterior aprendimos acerca de un conjunto de convertidor electromecánico simple para transformar la acción del pedal en una señal eléctrica que varía proporcionalmente.
Conversión de la acción del pedal a PWM
Ahora estudiemos una implementación de circuito que nos permitirá convertir la señal eléctrica del pedal en una señal PWM correspondientemente variable para el control de velocidad del motor previsto del vehículo.

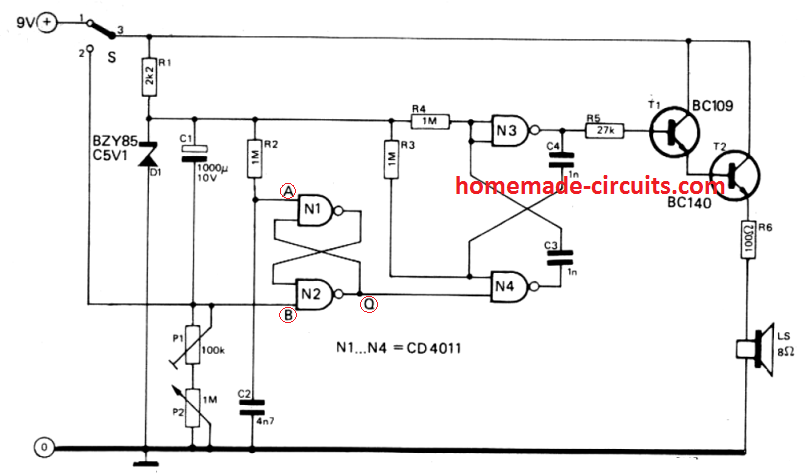
Con referencia al diagrama de circuito anterior, podemos evaluar el funcionamiento del circuito con la ayuda de los siguientes puntos:
IC1 está configurado como un generador de impulsos de 80 Hz con un tiempo máximo de encendido y un tiempo mínimo de apagado como ciclo de trabajo
IC2 está preparado como un comparador que primero convierte el pulso de 80 Hz anterior aplicado en su pin2 con ondas triangulares generadas en su pin6 y compara las ondas triangulares con el voltaje de modulación disponible en su pin5.
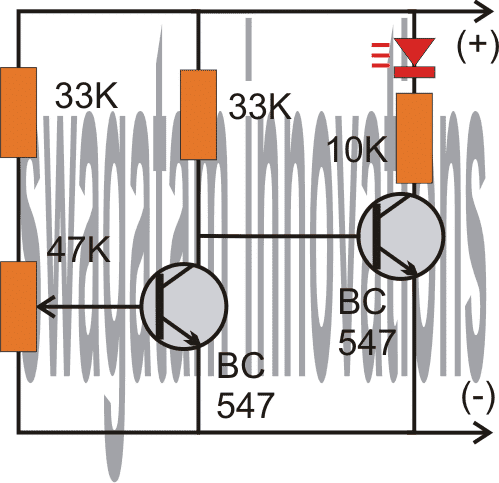
El voltaje de modulación del pin5 se deriva de un emisor BJT BC547 que está configurado como un colector común con su base conectada con las entradas LDR logradas a partir de las acciones del pedal.
Las diferentes resistencias en respuesta a la presión del pedal se comparan con el ajuste preestablecido de 100K y se desarrolla una magnitud proporcional de voltaje en la base del transistor que convierte la entrada de baja corriente en una señal de alta corriente equivalente sobre el pin 5 de IC2.
Este nivel de potencial instantáneo es aceptado y procesado por IC2 generando una magnitud proporcional de señales PWM para el mosfet y el motor conectado.
Por tanto, la velocidad del motor se controla y varía según los PWM fluctuantes en respuesta a las presiones del pedal del vehículo.
Los procedimientos anteriores convierten efectivamente las acciones del pedal en operaciones controladas del motor del vehículo y su velocidad.
Cómo configurar el circuito.
Es muy fácil.
- Presione el pedal hasta su punto máximo de manera que la cabeza del tornillo llegue a la posición más cercana posible frente al conjunto de LED / LDR.
- A continuación, ajuste el valor predeterminado de 100k hasta que el pin3 del IC2 comience a generar PWM con el ancho máximo, esto se puede confirmar midiendo el voltaje en el pin3 para que esté lo más cerca posible del voltaje de suministro del circuito, es decir, 5V.
- Una vez hecho esto, se puede suponer que el procedimiento de configuración está completo.
- Los resultados ahora se pueden verificar presionando el pedal a diferentes niveles y verificando que la velocidad del motor varíe de manera idéntica.
Artículo anterior: Circuito de medidor de ESR simple Siguiente: Cómo construir un circuito Grow Light