El artículo analiza un circuito regulador o atenuador de ventilador controlado por infrarrojos simple que utiliza piezas ordinarias como un circuito integrado 4017 y un circuito integrado 555.
Operación del circuito
En referencia al circuito de atenuación del ventilador controlado a distancia que se muestra, se pueden ver tres etapas principales incorporadas: la etapa del sensor de señal infrarroja que usa el IC TSOP1738 , contador de décadas de Johnson, secuenciador con el IC 4017 y una etapa de procesador PWM con el IC 555.

Las diversas operaciones involucradas dentro del circuito se pueden comprender con la ayuda de los siguientes puntos:
Cuando un haz de infrarrojos se enfoca en el sensor, el sensor produce una lógica baja en respuesta a esto, lo que a su vez hace que el PNP BC557 conduzca.
Uso del sensor TSOP1738
El sensor utilizado aquí es un TSOP1738, puede obtener más información al respecto en este simple IR remote control article
La conducción del transistor BC557 en respuesta al haz de infrarrojos conecta el suministro positivo al pin 14 del IC 4017 que es aceptado como un pulso de reloj por el IC.
Este pulso de reloj se traduce en un solo salto secuencial de una lógica alta desde el pinout existente al siguiente pinout subsiguiente en la secuencia a través de las salidas mostradas del IC 4017.
Esta transferencia secuencial o cambio de un pulso lógico alto de un pinout al siguiente a través de todas las salidas desde el pin # 3 al pin # 10 y viceversa se lleva a cabo en respuesta a cada haz momentáneo enfocado en el sensor IR por el mando a distancia IR.
Uso de IC 4017 para controlar el divisor de voltaje
Podemos ver que las salidas del IC 4017 tienen un conjunto de resistencias calculadas con precisión cuyos extremos libres exteriores están en cortocircuito y conectados a tierra a través de una resistencia de 1K.
La configuración anterior forma un divisor de potencial resistivo que genera niveles de potencial que se incrementan o disminuyen secuencialmente en el nodo 'A' en respuesta al desplazamiento de las lógicas altas a través de las salidas como se discutió en la explicación anterior.
Este potencial variable termina en la base de un transistor NPN cuyo emisor puede verse conectado al pin # 5 del IC 555 que está configurado como un astable de alta frecuencia.
Usando IC 555 como generador PWM
La etapa 555 básicamente funciona como un generador PWM que varía proporcionalmente a medida que varía su potencial de pin # 5. Los PWM variables se crean en su pin # 3.
Por defecto, el pin # 5 está conectado con una resistencia de 1K a tierra, lo que asegura que cuando no hay voltaje o voltaje mínimo en el pin # 5 resulta en un PWM extremadamente estrecho en su pin # 3 y como potencial o voltaje en su pin # 5 Aumenta, los PWM también ganan ancho proporcionalmente. El ancho es máximo cuando el potencial en el pin # 5 alcanza 2/3 del Vcc de su pin # 4/8.
Ahora aparentemente, a medida que las salidas del IC 4017 cambian creando un voltaje variable en la base del NPN, se transfiere una cantidad correspondiente de voltaje variable a través del pin # 5 del IC 555 que a su vez se convierte en un PWM que cambia en consecuencia a través del pin # 3 del IC.
Dado que el pin # 3 del IC está conectado a la puerta de un triac, la conducción del triac está influenciada proporcionalmente de alta a baja y viceversa en respuesta a los cambios de PWM sobre su puerta.
Esto se convierte efectivamente en un control de velocidad deseado o una regulación apropiada del ventilador conectado a través del MT1 del triac y la entrada de la red de CA.
Por lo tanto, la velocidad del ventilador se vuelve ajustable de rápida a lenta y viceversa en respuesta a los rayos infrarrojos IR conmutados en el sensor IR asociado del circuito.
Cómo configurar el circuito.
Se puede realizar con la ayuda de los siguientes pasos:
Inicialmente, mantenga el emisor del transistor BC547 desconectado con la patilla # 5 del IC555.
Ahora se puede suponer que las dos etapas (IC 4017 e IC 555) están aisladas entre sí.
Primero verifique la etapa IC 555 de la siguiente manera:
Desconectar la resistencia de 1K a través de la clavija # 5 y la tierra debería aumentar la velocidad del ventilador al máximo, y conectarlo de nuevo debería reducirla al mínimo.
Lo anterior confirmará el correcto funcionamiento de la etapa IC 555 PWM.
El ajuste preestablecido de 50k no es crucial y se puede establecer aproximadamente en el centro del rango preestablecido.
Sin embargo, el condensador 1nF podría experimentarse para obtener los mejores resultados posibles. Se pueden probar valores más altos de hasta 10 uF y monitorear los resultados para lograr la regulación de velocidad del ventilador más favorable.
A continuación, debemos verificar si el nodo de salida IC 4017 en 'A' crea un voltaje variable de 1V a 10V en respuesta a cada presión del rayo remoto IR sobre el sensor IR del circuito.
Si se cumple la condición anterior, podemos asumir que la etapa está funcionando correctamente, y ahora el emisor del BC547 se puede integrar con el pin # 5 del IC555 para la prueba final de la regulación de la velocidad del ventilador usando un mando a distancia IR.
El mando a distancia podría ser cualquier mando a distancia de televisión que usamos normalmente en nuestros hogares.
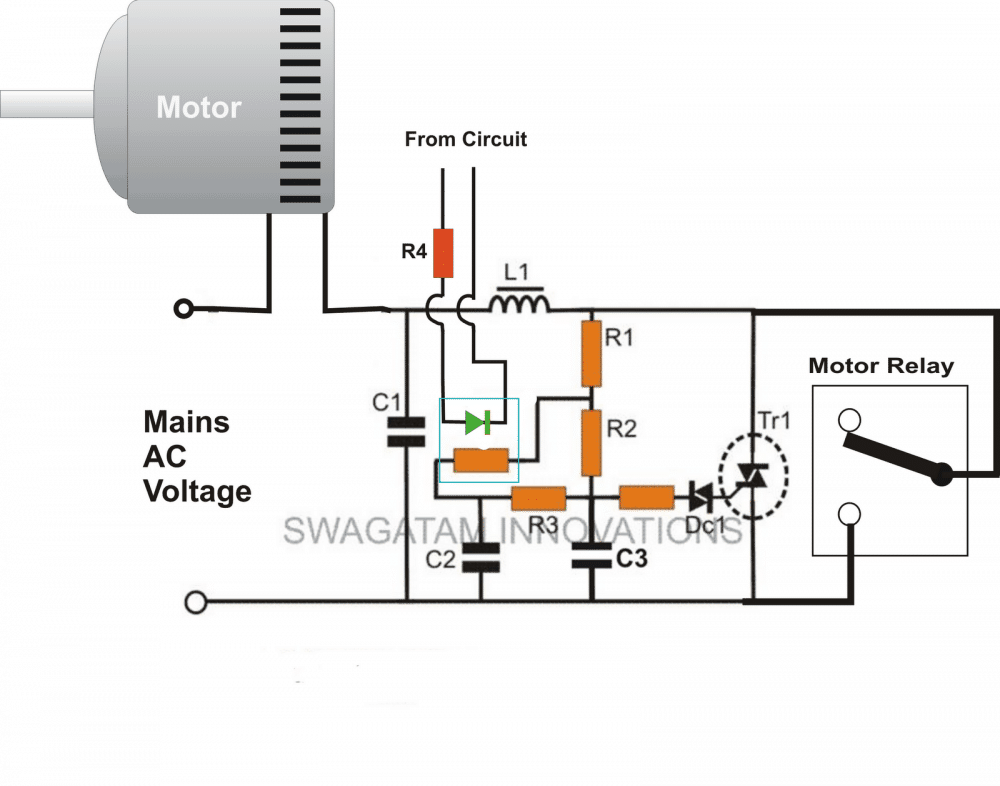
Si el diseño anterior no funciona correctamente con un ventilador conectado, es posible que deba someterse a una ligera modificación para mejorar los resultados, como se muestra a continuación:

El circuito necesita la ayuda de una etapa de controlador triac MOC3031 para hacer cumplir un control de ventilador limpio y sin problemas a través del mando a distancia.
Análisis de prueba
Al probar el circuito anterior, los resultados no fueron del todo satisfactorios, ya que el ventilador no se pudo controlar hasta el límite más bajo y mostró algunas vibraciones.
El análisis del diseño reveló que la aplicación de PWM en el triac estaba causando el problema, ya que los triacs no responden bien a los PWM de CC, sino que muestran reacciones mejoradas al corte de fase de CA como se usa en los interruptores de atenuación.
Usando Phase Control en lugar de PWM
El circuito discutido en este artículo elimina la idea de PWM para el control de atenuación del ventilador, en su lugar emplea pocos triacs de baja potencia para implementar secuencialmente el efecto de atenuación o aceleración en el motor del ventilador conectado.
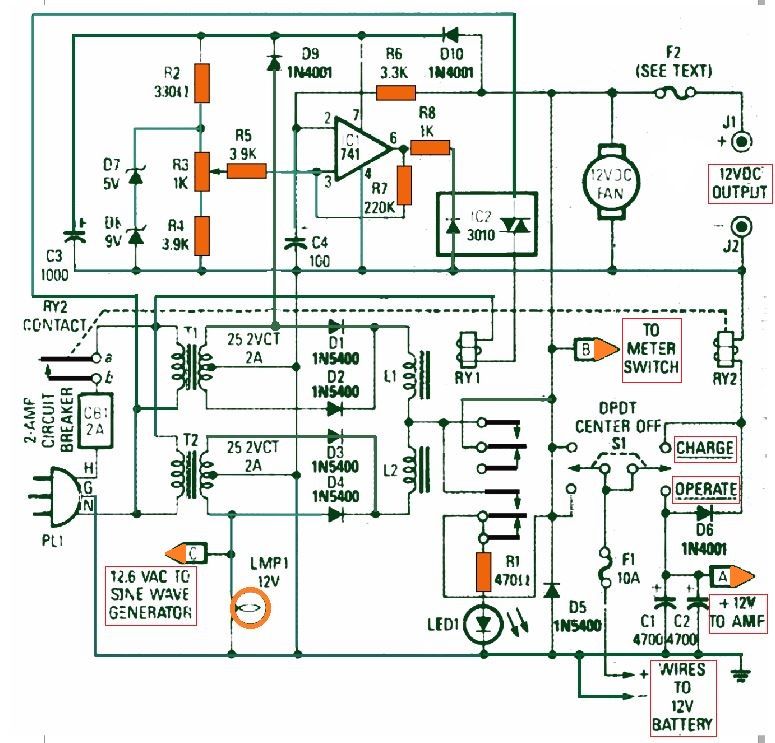
El diseño completo para el circuito de atenuación del ventilador con control remoto propuesto se puede ver a continuación:
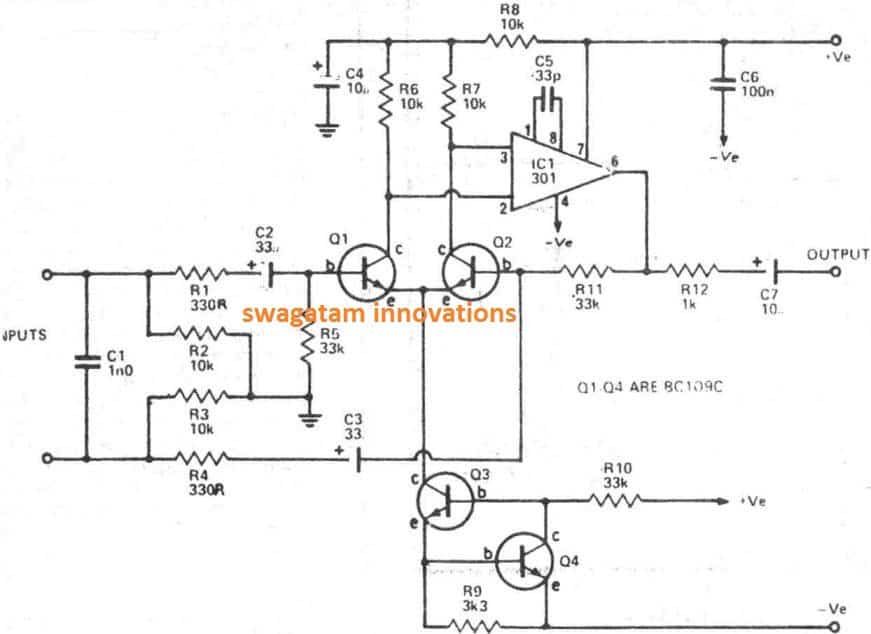
Diagrama de circuito

Nota: los 4 SCR están incorrectamente representados como SCR BT169, estos deben reemplazarse con triacs, como los triacs BCR1AM-8P, o cualquier otro triac similar también servirá.
Cómo funciona
Con referencia al diagrama anterior, podemos ver dos circuitos configurados en un par de etapas distintas.
El lado derecho del diagrama está configurado como atenuador de luz estándar o circuito atenuador de ventilador , excepto un cambio, que se puede ver cerca de su sección de olla habitual, donde se ha reemplazado con cuatro triacs que tienen cuatro resistencias separadas en su MT2, dispuestas con valores incrementales.
La etapa del lado izquierdo que comprende el IC 4017 está conectada como un generador lógico secuencial de 4 pasos, activado por una unidad de sensor de infrarrojos que forma el receptor de infrarrojos para recibir los activadores de conmutación desde una unidad de control remoto de infrarrojos portátil.
El alterno rayos infrarrojos remotos del transmisor infrarrojo hace que el IRS genere un pulso de alternancia en el pin # 14 del IC 4017, que a su vez convierte el pulso en un pulso alto lógico que cambia secuencialmente a través de su pin # 3 al pin # 10, después de lo cual se restablece al pin # 3 a través del pin Interacción # 1/15.
Los pines anteriores que son responsables de generar un pulso alto lógico que viaja secuencialmente están conectados en serie con las puertas A, B, C, D de los triacs indicados.
Dado que las resistencias conectadas con los ánodos de los triacs se convierten en los componentes determinantes para el límite de velocidad del ventilador, implica que al cambiar secuencialmente los triacs de un lado a otro, la velocidad del ventilador se puede aumentar o disminuir proporcionalmente, en 4 pasos discretos, dependiendo de los valores de R4 ---- R8.
Por lo tanto, cuando se presiona el botón del mando a distancia, los pines del IC 4017 activan el triac correspondiente, que a su vez conecta su resistencia de ánodo con la configuración del triac / diac del atenuador, ejecutando la cantidad relevante de velocidad del ventilador.
En el circuito de atenuación del ventilador con control remoto propuesto, se muestran 4 triacs para producir un control de velocidad de 4 pasos, sin embargo, 10 de estos triacs podrían implementarse con los 10 pines del IC 4017 para adquirir una buena regulación de la velocidad del ventilador con control discreto de 10 pasos.
Lista de partes
R1, R3 = 100 ohmios, R2 = 100K, R4 = 4K7, R5 = 10K,
C2 = 47uF / 25VC1, C4 = 22uF / 25V, C6 = 4.7uF / 25V,
C3 = 0.1, CERÁMICA
C5 = 100 uF / 50 V
C10 = 0,22 uF / 400 V
T1 = BC557
IRS = Sensor de infrarrojos TSOP
IC1 = 4017 IC
D1 = 1N4007
D2 = Zener de 12V 1 vatio
R9 = 15 K
R10 = 330 K
R4 --- R8 = 50K, 100K. 150 K, 220 K
R11 = 33K
R12 = 100 ohmios
Diac = DB-3
TR1 = BT136
L1 = 500 vueltas de 28SWG sobre cualquier perno de hierro.
C7 = 0,1 uF / 600 V
ADVERTENCIA: TODO EL CIRCUITO ESTÁ VINCULADO DIRECTAMENTE A LA RED DE CA, OBSERVE EXTREMA PRECAUCIÓN MIENTRAS PRUEBA EL CIRCUITO EN POSICIÓN ALIMENTADA
Artículo anterior: Circuito de motor de juguete con acción de avance hacia atrás temporizada Siguiente artículo: Circuito del controlador del temporizador de la válvula de flujo de agua