La publicación explica cómo hacer un carro de control remoto económico pero potente que el usuario puede maniobrar hacia la izquierda, la derecha, hacia adelante y hacia atrás según sea necesario, utilizando el teléfono remoto dado. La idea no se basa en un circuito de microcontrolador.
En una de mis publicaciones anteriores hablé sobre un circuito de coche de juguete a control remoto simple , la idea actual de un carro de control remoto está inspirada en el mismo concepto pero está destinada a ser utilizada para transportar cargas formidables y mucho más pesadas.
Carro con control remoto para tiendas minoristas
Este diseño puede ser específicamente adecuado y aplicable para centros comerciales o tiendas minoristas donde puede implementarse como un pequeño vehículo de transporte para transportar material dentro del recinto o local con la ayuda de algunas prensas de la unidad Tx remota.
El primer paso para construir el carro de control remoto propuesto sería adquirir un conjunto de módulos de RF estándar Rx / Tx ya sea de su distribuidor electrónico local o de cualquier tienda en línea, recomiendo comprar en una tienda en línea, ya que sería mucho más fácil y conveniente , aunque más costoso.
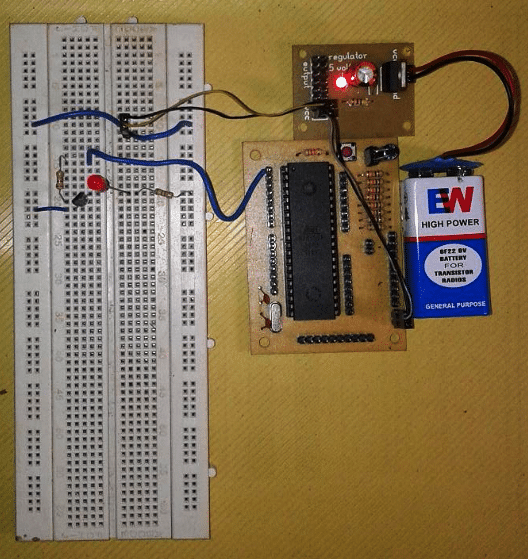
Las unidades adquiridas se verían como se muestra a continuación:
Uso de los módulos Tx, Rx de 433MHz

La unidad de color marrón del lado izquierdo es el Tx o la unidad transmisora, mientras que el circuito contiguo es el Rx o la unidad receptora.
La unidad Tx puede verse con 4 botones de color rojo marcados como A, B, C, D, y la placa Rx puede verse con 4 relés (cajas de color negro).
Los cuatro botones respectivos del módulo Tx están acoplados de forma inalámbrica para operar los cuatro relés correspondientes del módulo Rx.
Puede ver conectores fijados alrededor de los bordes de la placa (de color verde), estos conectores están debidamente terminados con las entradas de alimentación (+) (-) para la placa Rx y también con los contactos de relé, para los 4 relés.
Un relé, como todos sabemos, consta de 5 contactos básicos y sus pines a saber: 2 pines para la bobina, uno para el polo y uno para el N / C y el N / O.
Dado que hay 4 relés en la unidad Rx, podrá encontrar 5 x 4 = 20 salidas asociadas con los puntos de conexión relevantes.
Podría ser una tarea tediosa rastrear por separado estas terminaciones de relé en los conectores, por lo que recomiendo soldar los cables directamente en los pines del relé para evitar la tarea anterior, este esfuerzo será necesario más adelante mientras conectamos la unidad con el circuito de control del carro.
Construyendo el circuito de control de relé para el carro
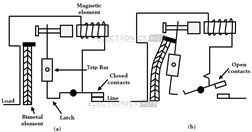
Para ello, necesitará un puñado de relés y diodos. Los relés deben estar clasificados correctamente para poder manejar los motores de rueda de alta potencia del carro. Recomiendo usar relés de marca OEN para esto, como se muestra en la siguiente imagen:

Los diodos que se requerirán en el circuito del controlador de relé pueden ser nuestros diodos estándar 1N4007.
Los detalles del circuito para el mismo se pueden ver en el siguiente diagrama:
Detalles y esquema del cableado del relé


Cómo funciona el circuito del carro remoto
Usando los relés especificados anteriormente y los diodos, deberá terminar de construir la placa de circuito del controlador de relé anterior, que puede hacerse simplemente en una pieza de veroboard.
Después de esto, tenemos una tarea importante a nuestra disposición que es integrar los cables verdes que se muestran en el diagrama anterior con la placa Rx del control remoto.
Antes de la integración tendremos que insertar algunos mods en el módulo Rx, como se explica a continuación:
Usando pedazos de cables aislados, apropiadamente pelados y estañados en los extremos, continúe conectando (soldando) todos los pines de los polos del relé y vincule esta unión común con la línea positiva de la placa Rx.
Ahora en esta situación podemos asumir que cuando los relés no están en un estado activado (a través del mando a distancia) la entrada del polo positivo de cada relé estará vinculada a sus respectivos puntos N / C, y cuando se active el positivo del polo se conectará cambiar y conectarse con los puntos N / O relevantes.
En resumen, al activarse el contacto N / O recibirá la alimentación positiva y por lo tanto estamos interesados en esta alimentación positiva de los contactos N / O porque estos se iniciarán solo cuando los relés estén activados, lo que implica que cuando el Tx (transmisor ) se pulsan los botones.
Por lo tanto, todos los pines N / O relevantes deben unirse a los cables verdes del circuito del controlador de relé indicado anteriormente.
Una vez hecho esto, el Rx se integrará con el módulo controlador de relé para ejecutar todas las maniobras previstas del carro controlado a distancia, es decir: los movimientos de avance, retroceso, y los giros a la derecha e izquierda.
Encendido de la placa de controlador de relés
Dado que los relés en la etapa del controlador de relés serían responsables de mover los motores pesados conectados con la rueda del carro, el suministro para esto tendría que ser equivalentemente fuerte, por lo que las baterías de plomo ácido de ciclo profundo se vuelven ideales para esta aplicación.
Suponiendo que los motores tengan una potencia nominal de 12V, una batería de plomo-ácido de 40AH sería lo suficientemente buena para permitir que el carro se mueva incluso con cargas más pesadas.
Configuración de las ruedas con los motores para las maniobras previstas
Como se puede identificar en la siguiente figura, el carro de control remoto discutido requerirá 4 ruedas para sostener y hacer rodar el sistema.
Sin embargo, solo las dos ruedas delanteras serían responsables de permitir las maniobras de retroceso, avance, derecha e izquierda previstas y, por lo tanto, los motores deberían sujetarse con estas dos ruedas delanteras del carro, como se muestra en la siguiente imagen:

Configuración de las conexiones de la rueda del carro
Las ruedas traseras son simplemente ruedas falsas, fijadas solo para permitir un movimiento libre del carro, en respuesta a los comandos de las ruedas delanteras.
Como se puede observar en la imagen de arriba, el módulo marcado como conjunto de PCB es la placa del controlador del relé, el módulo remoto significa la placa del receptor remoto Rx mientras que la batería es la batería de 40 AH 12V que discutimos en la sección anterior del artículo.
Después de ensamblar, es posible que deba ajustar y verificar las conexiones de los cables del motor con la placa del controlador del relé.
Para un movimiento de avance y retroceso ambos motores deben estar sincronizados entre sí, por otro lado para ejecutar un giro a la derecha o a la izquierda, los motores deben pasar por un movimiento de rotación opuesto.
Si encuentra que el motor no se comporta de la manera anterior, lo más probable es que se corrija simplemente cambiando la polaridad de uno de los motores. Esto corregirá inmediatamente la situación y obligará a los motores a realizar las maniobras especificadas.
Finalmente, los botones A. B, C, D pueden combinarse o intercambiarse adecuadamente para cualquiera de las maniobras respectivas ajustando los enlaces del cable verde con el módulo Rx, según las preferencias personales de los usuarios.
Anterior: Cómo modificar SMPS para salida de voltaje y corriente ajustable Siguiente: Sensor de microondas o circuito de sensor Doppler