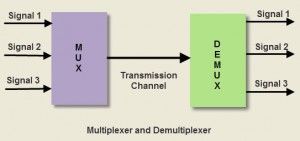
Introducción a los robots
El robot es una máquina que se parece a los seres humanos. Eso ha sido programado para hacer algo. La palabra Robot proviene de la palabra eslava robota (que significa trabajador forzado). El robot fue desarrollado en la década de 1960.Los robots están hechos de metales y mezclan otros elementos. Los robots simplemente mandan y lo que dicen los humanos. Hace treinta años, los robots eran algo en una película de ciencia ficción. Pero hoy la robótica se utiliza en muchas áreas. Y es muy importante para el futuro de la humanidad. los tecnologías robóticas se mejoran para ayudar a la defensa nacional, la atención médica, la fabricación, la seguridad nacional, la educación, los bienes de consumo y muchos sectores diferentes. Los médicos ya están utilizando la robótica en cirugías especiales. Los robots son importantes porque realizan tareas peligrosas e imposibles de realizar para los humanos.
5 razones por las que los robots han sido populares
- Velocidad
- Ambientes peligrosos
- Tareas repetitivas
- Eficiencia
- Precisión
Velocidad:
Se pueden utilizar robots porque son más rápidos que las personas en la realización de tareas. El robot es realmente un mecanismo controlado por una computadora. Sabemos que las computadoras pueden hacer cálculos y procesar datos muy rápido en comparación con los seres humanos. En realidad, algunos robots se mueven más rápidamente para realizar una tarea, como recoger e insertar elementos, más rápido que los humanos.
Ambientes peligrosos:
Los robots pueden usarse en entornos peligrosos porque pueden trabajar en lugares donde un humano estaría en peligro. Por ejemplo, un robot puede diseñarse para soportar una mayor cantidad de calor, radiación y humos químicos que los humanos.
Tareas repetitivas:
Algunas veces, los robots no son mucho más rápidos que los humanos, pero son buenos simplemente haciendo el mismo trabajo una y otra vez. Esto es fácil para el robot, porque una vez que el robot ha sido programado para hacer un trabajo una vez, el mismo programa puede ejecutarse muchas veces para realizar el trabajo muchas veces. Y el robot no se aburrirá como lo haría un humano.
Eficiencia:
La eficiencia se trata de realizar tareas sin desperdicio. Esto significa
- Sin perder el tiempo
- No desperdiciar materiales
- No desperdiciar energía
Precisión:
La precisión se trata de realizar tareas con mucha precisión. En una fábrica de artículos, cada artículo debe fabricarse de manera idéntica. Cuando se ensamblan los elementos, un robot puede colocar las piezas en una fracción de milímetro.
Controlar un robot
Un robot básico o un sistema robótico consta de un cuerpo rígido que alberga todos los circuitos del robot. El circuito consta de sensores que detectan cualquier cambio en el entorno y alimentan esta información a la unidad de control.
Según la entrada de los sensores, la unidad de control controla los actuadores en consecuencia. Por tanto, la principal operación del robot recae en la unidad de control. En algunas aplicaciones, el robot es completamente automático, es decir, el control se encuentra dentro del propio dispositivo y, basándose en alguna unidad de sensor, los actuadores son controlados automáticamente por la unidad de control. En algunas aplicaciones, el robot se controla manualmente.
Veamos dos formas de controlar un robot manualmente
- Usando un celular
- Usando un control remoto de TV
Vehículo robótico controlado por teléfono celular:
Cuando hablamos de vehículos robot inalámbricos , generalmente pensamos en circuitos de tecnología RF. Pero este proyecto es muy diferente. Utiliza un teléfono celular para controlar el movimiento del vehículo robótico. Aquí hemos utilizado la tecnología DTMF para controlar el vehículo robótico utilizando el teléfono móvil. Usamos dos teléfonos celulares, uno está conectado al robot y otro es el teléfono del usuario. La comunicación se establece entre estos dos móviles y si se presiona cualquier tecla, ese tono se escucha en el otro extremo de la celda. Este tono se denomina tono de “multifrecuencia de tono dual” (DTMF).

Vehículo robótico controlado por teléfono celular

Diagrama de circuito del vehículo robótico controlado por teléfono celular
Este proyecto está diseñado para desarrollar un vehículo robótico que está controlado por el teléfono celular. Esto se basa en el microcontrolador 8051. Los dos teléfonos móviles controlan el robot según los requisitos. Un teléfono celular está conectado al robot y otro es el celular del usuario. Cuando se presiona una tecla en el teléfono celular del usuario, esa tecla genera el tono correspondiente, se recibe en otro celular. El tono recibido es procesado por el microcontrolador con ayuda del decodificador DTMF. El decodificador decodifica el tono DTMF en dígitos binarios y estos datos codificados binarios se envían al microcontrolador. Basado en la entrada del teléfono celular, el microcontrolador en consecuencia da las señales adecuadas al controlador del motor para que gire cada uno de los motores en la dirección deseada. Por ejemplo, al presionar un número particular en el móvil del usuario, la llamada se marca automáticamente al teléfono móvil del sistema. El sistema móvil está conectado al decodificador DTMF que en consecuencia decodifica el tono y el motor gira en la dirección correspondiente al número presionado.
Vehículo robótico controlado por infrarrojos:
En este sistema, principalmente un vehículo robótico es controlado por el control remoto del televisor. El sensor de infrarrojos (IR) está interconectado con la unidad de control del robot para detectar la señal remota. Esta información se transmite a la unidad de control que mueve el robot según el requisito. Se utiliza un microcontrolador como sistema de control.
En este mando a distancia por infrarrojos funciona como un transmisor. En el momento en que se presiona el botón en el control remoto, el receptor de infrarrojos pasará y obtendrá la señal. Esta señal se envía al microcontrolador que decodifica la señal y realiza el movimiento correspondiente según el botón presionado en el control remoto. Por ejemplo, si se presiona el número 1 en el control remoto, el robot se girará a la izquierda según nuestro requisito. Las otras pruebas de empresas (adelante, atrás y derecha) se realizarán de forma comparativa utilizando IR. En el extremo receptor, el desarrollo se logra mediante dos motores que se interconectan con el microcontrolador.
El programa se escribe, es decir, mientras se ejecuta, envía comandos al controlador del motor IC según su requisito para hacer funcionar el motor para el movimiento del robot como se explicó anteriormente.

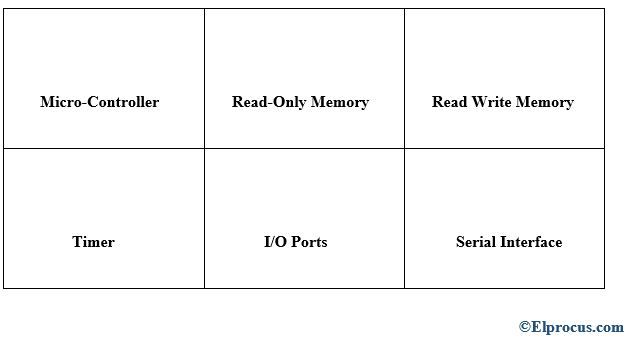
Diagrama de bloques del vehículo robótico controlado por infrarrojos
Si tiene alguna duda con respecto a este artículo, deje un comentario. ¿Y déjame saber más aplicaciones y métodos relacionados con esto?