Introducción
Los motores de inducción monofásicos se utilizan ampliamente en electrodomésticos y controles industriales. El motor de inducción monofásico de condensador dividido permanente (PSC) es el motor más simple y más utilizado de este tipo.
Por diseño, los motores PSC son unidireccionales, lo que significa que están diseñados para girar en una dirección. Al agregar bobinados adicionales y relés e interruptores externos, o al usar mecanismos de engranajes, se puede cambiar la dirección de rotación. En esta idea, discutiremos en detalle cómo controlar la velocidad de un motor PSC en ambas direcciones usando un microcontrolador PIC16F72 y electrónica de potencia.
Se eligió el microcontrolador PIC16F72 porque es uno de los microcontroladores de propósito general más simples y de bajo costo que Microchip tiene en su cartera. Aunque no tiene los PWM en el hardware para impulsar las salidas PWM complementarias con banda muerta insertada, todos los PWM se generan en el firmware utilizando temporizadores y salidas a pines de salida de uso general.
¿Qué es el variador de frecuencia?
El variador de frecuencia o VFD es la forma que permite controlar la velocidad del motor de inducción aplicando una frecuencia variable de voltaje de suministro de CA. Al controlar la frecuencia de CA de salida, es posible impulsar el motor a diferentes velocidades según los requisitos. Estos son accionamientos de velocidad ajustable que se utilizan principalmente en aplicaciones industriales como bombas, sistemas de ventilación, ascensores, accionamientos de máquinas herramienta, etc. Es esencialmente un sistema de ahorro de energía. Por lo tanto, el primer requisito es generar una onda sinusoidal con diferentes frecuencias para VFD.
¿Cuál es la tecnología adoptada en VFD?
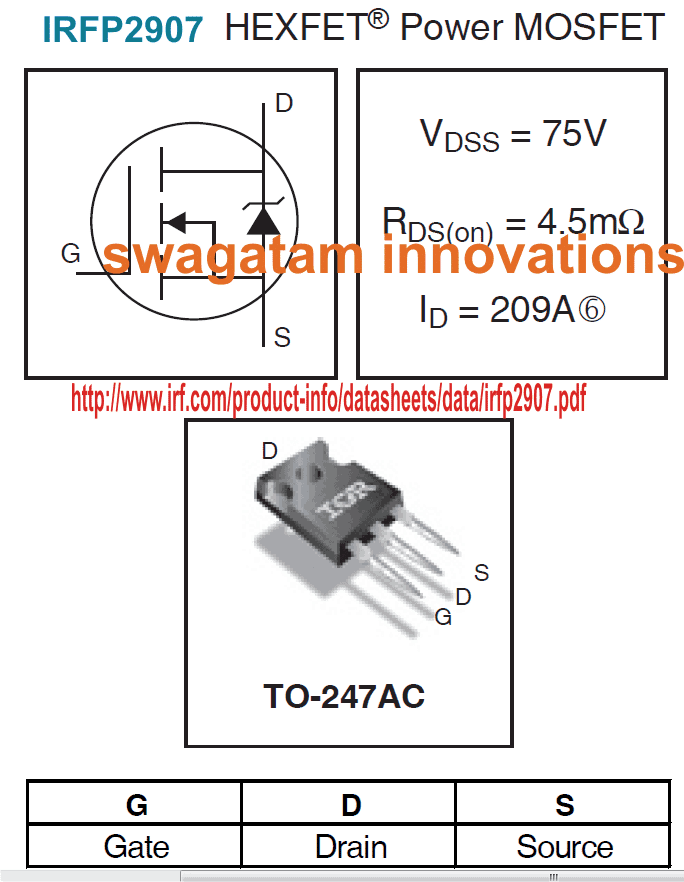
Es el sistema que da salida AC con frecuencia variable para controlar la velocidad del motor según las necesidades. Los inversores de frecuencia variable monofásicos son más comunes ya que la mayoría de los dispositivos funcionan con suministro de CA monofásico. Consiste en un puente rectificador de onda completa para convertir 230/110 voltios CA a aproximadamente 300/150 voltios CC. La salida de CC del puente rectificador se suaviza mediante un condensador de suavizado de alto valor para eliminar las ondas de CA. Esta CC de voltaje fijo se alimenta al circuito de generación de frecuencia formado por transistores MOSFET (transistor de efecto de campo de óxido metálico) / IGBT (transistor bipolar de puerta aislada). Este circuito MOSFET / IGBT recibe la CC y la convierte en CA con frecuencia variable para controlar la velocidad del dispositivo.
El cambio de frecuencia se puede lograr mediante circuitos electrónicos o microcontroladores. Este circuito varía la frecuencia de voltaje (PWM) aplicada a la unidad de puerta del circuito MOSFET / IGBT. Por lo tanto, aparece en la salida voltaje CA de frecuencia variable. El Microcontrolador se puede programar para cambiar la frecuencia de la salida según las necesidades.
El sistema VFD:
El dispositivo de frecuencia variable tiene tres partes, como un motor de CA, un controlador y una interfaz de operación.
El motor de CA utilizado en VFD es generalmente un motor de inducción trifásico, aunque el motor monofásico motor se utiliza en algunos sistemas. Generalmente se utilizan motores que están diseñados para operación de velocidad fija, pero algunos diseños de motor ofrecen un mejor rendimiento en VFD que el diseño estándar.
La parte del controlador es el circuito convertidor de potencia electrónico sólido para convertir CA a CC y luego a CA de onda cuasi sinusoidal. La primera parte es la sección del convertidor de CA a CC que tiene un puente rectificador de onda completa, generalmente un puente de onda completa de tres fases / monofásico. Este intermedio de CC se convierte luego en CA de onda cuasi sinusoidal utilizando el circuito de conmutación del inversor. Aquí, los transistores MOSFET / IGBT se utilizan para invertir CC a CA.
La sección del inversor convierte CC en tres canales de CA para impulsar el motor trifásico. La sección del controlador también se puede diseñar para brindar un factor de potencia mejorado, menos distorsión armónica y baja sensibilidad a los transitorios de CA de entrada.
Control de voltios / Hz:
El circuito del controlador regula la frecuencia de la CA suministrada al motor a través del método de control de voltios por hercio. El motor de CA requiere voltaje aplicado variable cuando la frecuencia cambia para dar el par especificado. Por ejemplo, si el motor está diseñado para funcionar en 440 voltios a 50 Hz, entonces la CA aplicada al motor debe reducirse a la mitad (220 voltios) cuando la frecuencia cambia a la mitad (25 Hz). Esta regulación se basa en Voltios / Hz. En el caso anterior, la relación es 440/50 = 8,8 V / Hz.
 Otros métodos de control de voltaje:
Otros métodos de control de voltaje:
 Otros métodos de control de voltaje:
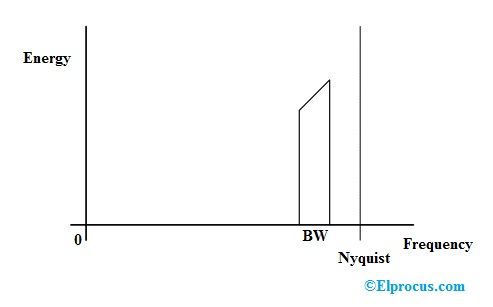
Otros métodos de control de voltaje:Además del control de voltios / Hz, métodos más avanzados como el control directo de par o DTC, Modulación de ancho de pulso de vector espacial (SVPWM) , etc.también se utilizan para controlar la velocidad del motor. Al controlar el voltaje en el motor, el flujo magnético y el par se pueden controlar con precisión. En el método PWM, los interruptores del inversor producen una onda cuasi sinusoidal a través de una serie de pulsos estrechos con duraciones de pulso variables pseudo sinusoidales.
Interfaz de funcionamiento:
Esta sección permite al usuario arrancar / detener el motor y ajustar la velocidad. Otras facilidades incluyen inversión de motor, cambio entre control de velocidad manual y automático, etc. La interfaz de operación consiste en un panel con pantalla o indicadores y medidores para mostrar la velocidad del motor, voltaje aplicado, etc. Generalmente se proporciona un conjunto de interruptores de teclado. para controlar el sistema.
Incorporado -Soft Start:
En un motor de inducción ordinario, encendido mediante un interruptor de CA, la corriente consumida es mucho mayor que el valor nominal y puede aumentar con el aumento de la aceleración de la carga para alcanzar la velocidad máxima del motor.
Por otro lado, en un motor controlado por VFD, se aplica inicialmente un voltaje bajo a baja frecuencia. Esta frecuencia y voltaje aumentan a un ritmo controlado para acelerar la carga. Esto desarrolla casi más par que el valor nominal del motor.
Conmutación del motor VFD :
La frecuencia y el voltaje aplicado se reducen primero a un nivel controlado y luego continúan disminuyendo hasta que se vuelve cero y el motor se apaga.
Circuito de aplicación para controlar la velocidad del motor de inducción monofásico
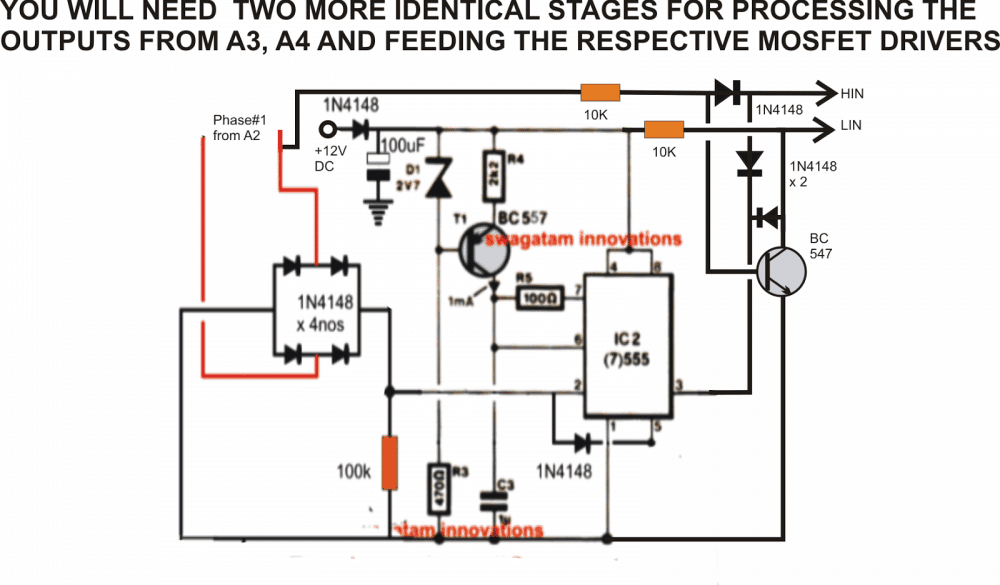
El enfoque es relativamente fácil en lo que respecta al circuito de potencia y al circuito de control. En el lado de entrada, se usan duplicadores de voltaje y en el lado de salida se usa un puente en H, o inversor de 2 fases, como se muestra en la Figura 2. Un extremo de los devanados principal y de arranque están conectados a cada medio puente y el otros extremos están conectados al punto neutro de la fuente de alimentación de CA.
El circuito de control requiere cuatro PWM con dos pares complementarios con una banda muerta suficiente entre las salidas complementarias. Las bandas muertas de PWM son PWM0-PWM1 y PWM2-PWM3. El PIC16F72 no tiene PWM diseñados en el hardware para generar la salida que necesitamos. Con respecto a VF, el bus de CC se sintetiza variando la frecuencia y la amplitud. Esto dará dos voltajes sinusoidales desfasados.
Si el voltaje aplicado al devanado principal retrasa el devanado de arranque en 90 grados, el motor funciona en una dirección (es decir, hacia adelante). Si queremos cambiar la dirección de la rotación, entonces el voltaje aplicado al devanado principal es para conducir el devanado de inicio.
Espero que tenga una idea sobre el variador de frecuencia para el motor de inducción del artículo anterior. así que si tiene alguna duda sobre este concepto o el eléctrico y proyecto electronico por favor deje la sección de comentarios a continuación.