El circuito VFD trifásico presentado ( diseñado por mí ) se puede utilizar para controlar la velocidad de cualquier motor de CA trifásico con escobillas o incluso un motor de CA sin escobillas. La idea fue solicitada por el Sr.Tom
Usando el VFD
El circuito VFD trifásico propuesto se puede aplicar universalmente para la mayoría de los motores de CA trifásicos donde la eficiencia de la regulación no es demasiado crítica.
Se puede utilizar específicamente para controlar velocidad del motor de inducción de jaula de ardilla con un modo de bucle abierto, y posiblemente también en el modo de bucle cerrado que se discutirá en la parte posterior del artículo.
Módulos necesarios para inversor trifásico
Para diseñar el VFD trifásico propuesto o el circuito de variador de frecuencia, se requieren esencialmente las siguientes etapas fundamentales del circuito:
- Circuito controlador de voltaje PWM
- Circuito controlador de puente H de lado alto / lado bajo trifásico
- Circuito generador trifásico
- Voltaje al circuito convertidor de frecuencia para generar el parámetro V / Hz.
Aprendamos los detalles de funcionamiento de las etapas anteriores con la ayuda de la siguiente explicación:
Se puede ver un circuito controlador de voltaje PWM simple en el diagrama que se muestra a continuación:

El controlador PWM
Ya he incorporado y explicado el funcionamiento de la etapa del generador de PWM anterior, que está básicamente diseñada para generar una salida PWM variable a través del pin3 de IC2 en respuesta al potencial aplicado en el pin5 del mismo IC.
El valor predeterminado de 1K que se muestra en el diagrama es la perilla de control RMS, que puede ajustarse adecuadamente para adquirir la cantidad proporcional deseada de voltaje de salida en forma de PWM en el pin3 de IC2 para su procesamiento posterior. Está configurado para producir una salida correspondiente que puede ser equivalente a la red eléctrica de 220 V o 120 V CA RMS.
El circuito del controlador H-Bridge
El siguiente diagrama a continuación muestra un circuito de controlador trifásico de puente H de un solo chip que utiliza el IC IRS2330.
El diseño parece sencillo ya que la mayoría de las complejidades son manejadas por los circuitos sofisticados integrados en los chips.
Se aplica una señal trifásica bien calculada a través de las entradas HIN1 / 2/3 y LIN1 / 2/3 del IC a través de una etapa generadora de señal trifásica.
Las salidas del IC IRS2330 Se puede ver integrado con 6 mosfets o red puente IGBT, cuyos desagües se configuran adecuadamente con el motor que se necesita controlar.
Las puertas del lado bajo del mosfet / IGBT están integradas con el pin IC2 # 3 de la etapa del circuito del generador de PWM discutida anteriormente para iniciar la inyección de PWM en la etapa del puente del mosfet. Esta regulación finalmente ayuda al motor a obtener la velocidad deseada según la configuración (a través del ajuste preestablecido de 1 k en el primer diagrama).

En el siguiente diagrama visualizamos el circuito generador de señal trifásico requerido.

Configuración del circuito generador trifásico
El generador trifásico está construido alrededor de un par de chips CMOS CD4035 y CD4009 que generan señales trifásicas dimensionadas con precisión en los pines mostrados.
La frecuencia de las señales trifásicas depende de los relojes de entrada alimentados, que deben ser 6 veces la señal trifásica deseada. Es decir, si la frecuencia trifásica requerida es 50 Hz, el reloj de entrada debe ser 50 x 6 = 300 Hz.
También implica que los relojes anteriores podrían variarse para variar la frecuencia efectiva del controlador IC que a su vez sería responsable de variar la frecuencia operativa del motor.
Sin embargo, dado que la alteración de frecuencia anterior debe ser automática en respuesta al voltaje variable, un convertidor de voltaje a frecuencia se vuelve esencial. La siguiente etapa analiza un circuito convertidor de voltaje a frecuencia simple y preciso para la implementación requerida.
Cómo crear una relación V / F constante
Por lo general, en los motores de inducción, para mantener una eficiencia óptima de la velocidad y el toque del motor, es necesario controlar la velocidad de deslizamiento o la velocidad del rotor, lo que a su vez es posible manteniendo una relación V / Hz constante. Dado que el flujo magnético del estator es siempre constante independientemente de la frecuencia de suministro de entrada, la velocidad del rotor se vuelve fácilmente controlable por manteniendo constante la relación V / Hz .
En un modo de bucle abierto, esto se puede hacer de manera aproximada manteniendo relaciones V / Hz predeterminadas e implementándolas manualmente. Por ejemplo, en el primer diagrama, esto se puede hacer ajustando adecuadamente el valor predeterminado R1 y 1K. R1 determina la frecuencia y el 1K ajusta el RMS de la salida, por lo tanto, ajustando adecuadamente los dos parámetros podemos aplicar manualmente la cantidad requerida de V / Hz.
Sin embargo, para obtener un control relativamente preciso del par y la velocidad de un motor de inducción, tenemos que implementar una estrategia de circuito cerrado, en la que los datos de velocidad de deslizamiento deben alimentarse al circuito de procesamiento para un ajuste automático de la relación V / Hz de modo que esto el valor siempre permanece cerca de constante.
Implementación de la retroalimentación de circuito cerrado
El primer diagrama de esta página se puede modificar adecuadamente para diseñar la regulación automática V / Hz de bucle cerrado como se muestra a continuación:

En la figura anterior, el potencial en el pin # 5 de IC2 determina el ancho del SPWM que se genera en el pin # 3 del mismo IC. Los SPWM se generan comparando la muestra de ondulación de 12 V de la red en el pin n. ° 5 con la onda triangular en el pin n. ° 7 de IC2, y esto se alimenta a los mosfets del lado bajo para el control del motor.
Inicialmente, este SPWM se establece en un nivel ajustado (usando un perset de 1K) que activa las puertas IGBT del lado bajo del puente trifásico para iniciar el movimiento del rotor al nivel de velocidad nominal especificado.
Tan pronto el rotor del rotor comienza a girar, el tacómetro adjunto con el mecanismo del rotor hace que se desarrolle una cantidad adicional proporcional de voltaje en el pin # 5 de IC2, esto hace que los SPWM se ensanchen proporcionalmente y provoquen más voltaje en las bobinas del estator del motor. Esto provoca un aumento adicional en la velocidad del rotor, lo que provoca más voltaje en el pin # 5 de IC2, y esto continúa hasta que el voltaje equivalente SPWM ya no puede aumentar y la sincronización del rotor del estator alcanza un estado estable.
El procedimiento anterior se autoajusta a lo largo de los períodos operativos del motor.
Cómo hacer e integrar el tacómetro
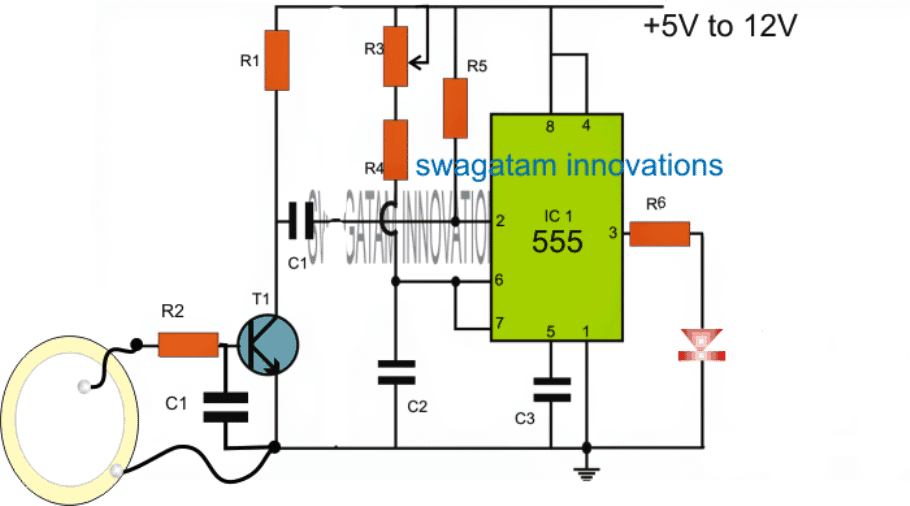
En el siguiente diagrama se puede ver un diseño de tacómetro simple, este podría integrarse con el mecanismo del rotor de manera que la frecuencia de rotación pueda alimentar la base del BC547.

Aquí, los datos de velocidad del rotor se recopilan de un sensor de efecto Hall o una red de LED / sensores IR y se envían a la base de T1.
T1 oscila a esta frecuencia y activa el circuito del tacómetro realizado configurando adecuadamente un circuito monoestable IC 555.
La salida del tacómetro anterior varía proporcionalmente en respuesta a la frecuencia de entrada en la base de T1.
A medida que aumenta la frecuencia, el voltaje en el extremo derecho de la salida D3 también aumenta y viceversa, y ayuda a mantener la relación V / Hz en un nivel relativamente constante.
Cómo controlar la velocidad
La velocidad del motor que usa V / F constante se puede lograr alterando la entrada de frecuencia en la entrada de reloj de IC 4035. Esto se puede lograr alimentando una frecuencia variable desde un circuito astable IC 555 o cualquier circuito astable estándar a la entrada de reloj de IC 4035.
El cambio de frecuencia cambia efectivamente la frecuencia de funcionamiento del motor, lo que en consecuencia reduce la velocidad de deslizamiento.
Esto es detectado por el tacómetro, y el tacómetro reduce proporcionalmente el potencial en el pin # 5 del IC2, lo que a su vez reduce proporcionalmente el contenido de SPWM en el motor y, en consecuencia, el voltaje del motor se reduce, asegurando la variación de la velocidad del motor con la correcta relación V / F requerida.
Un convertidor de V a F casero

En el circuito convertidor de voltaje a frecuencia anterior se utiliza un IC 4060 y su resistencia dependiente de la frecuencia se ve influenciada a través de un conjunto de LED / LDR para las conversiones previstas.
El conjunto de LED / LDR está sellado dentro de una caja a prueba de luz, y el LDR se coloca a través de una resistencia dependiente de la frecuencia de 1M del IC.
Dado que la respuesta LDR / LDR es bastante lineal, la iluminación variable del LED en el LDR genera una frecuencia proporcionalmente variable (creciente o decreciente) a través del pin 3 del IC.
El FSD o el rango de V / Hz de la etapa podría establecerse configurando adecuadamente la resistencia de 1M o incluso el valor C1.
El LED es voltaje derivado e iluminado a través de los PWM desde la primera etapa del circuito PWM. Implica que a medida que varían los PWM, la iluminación del LED también variará, lo que a su vez daría lugar a una frecuencia proporcionalmente creciente o decreciente en el pin 3 del IC 4060 en el diagrama anterior.
Integración del convertidor con VFD
Esta frecuencia variable del IC 4060 ahora simplemente necesita integrarse con la entrada de reloj del generador trifásico IC CD4035.
Las etapas anteriores forman los ingredientes principales para hacer un circuito VFD trifásico.
Ahora, sería importante discutir sobre el BUS de CC requerido para suministrar los controladores de motor IGBT y los procedimientos de configuración para todo el diseño.
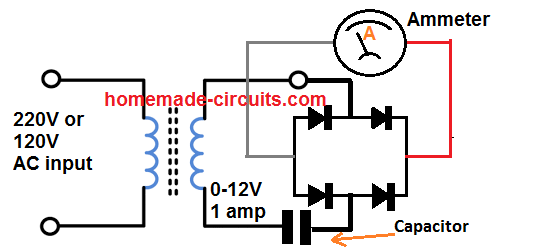
El BUS de CC aplicado a través de los rieles del puente H IGBT se puede obtener rectificando la entrada de red trifásica disponible utilizando la siguiente configuración de circuito. Los rieles IGBT DC BUS están conectados a través de los puntos indicados como 'carga'

Para una fuente monofásica, la rectificación se puede implementar usando una configuración de red de puente de 4 diodos estándar.
Cómo configurar el circuito VFD trifásico propuesto
Puede realizarse según las siguientes instrucciones:
Después de aplicar el voltaje del bus de CC a través de los IGBT (sin el motor conectado), ajuste el ajuste preestablecido de PWM 1k hasta que el voltaje a través de los rieles sea igual a las especificaciones de voltaje del motor previstas.
A continuación, ajuste el valor predeterminado del IC 4060 1M para ajustar cualquiera de las entradas del IC IRS2330 al nivel de frecuencia correcto requerido según las especificaciones del motor dadas.
Después de completar los procedimientos anteriores, el motor especificado puede conectarse y alimentarse con diferentes niveles de voltaje, parámetro V / Hz y confirmarse para operaciones automáticas V / Hz sobre el motor conectado.
Anterior: Cómo construir un circuito Grow Light Siguiente artículo: Exploración del circuito del ablandador de agua