En este post aprenderemos el concepto básico de funcionamiento de los escáneres térmicos o termómetros IR sin contacto, y también aprenderemos a realizar un prototipo práctico de bricolaje de la unidad sin Arduino .
En la era posterior al COVID-19, ver a los médicos sosteniendo una pistola de temperatura sin contacto y apuntando hacia la frente de un sospechoso de COVID-19 es algo común.
El dispositivo es en realidad un dispositivo de termómetro sin contacto, que detecta la temperatura instantánea de la superficie del cuerpo del sospechoso y le permite al médico saber si la persona es normal o si tiene fiebre.

Método de prueba básico
En el proceso de prueba, encontramos a la persona autorizada apuntando un rayo láser de la pistola de temperatura sin contacto en la frente del sospechoso y observando la temperatura en el panel LCD posterior del dispositivo.
El rayo láser en realidad no tiene conexión directa con el procedimiento de medición de temperatura. Se emplea simplemente para ayudar al médico a asegurarse de que el termómetro infrarrojo esté orientado correctamente al lugar ideal del cuerpo para determinar la temperatura corporal sobre todo con precisión.
Ley Stefan-Boltzmann
Según lo establecido por la ley de Stefan-Boltzmann, la salida radiante total de un cuerpo Mes(T) es proporcional a la cuarta potencia de su temperatura, como se muestra en la siguiente ecuación
METROes(T) = εσT4
En esta ecuación, ε significa la emisividad.
σ denota la constante de Stefan-Boltzmann que es equivalente a la cantidad 5.67032 x 10-1212 Wcm-2A-4, donde la letra K es la unidad de temperatura en Kelvin.
La ecuación anterior sugiere que cuando la temperatura de un cuerpo aumenta, su radiación infrarroja también aumenta proporcionalmente. Este resplandor de infrarrojos se puede medir a distancia sin necesidad de ningún contacto físico. La lectura nos puede proporcionar el nivel instantáneo de temperatura del cuerpo.
Qué sensor es aplicable
El sensor más adecuado y utilizado en termómetros sin contacto es un sensor de termopila .
Un sensor de termopila convierte un mapa de calor infrarrojo incidente de una fuente distante en una cantidad proporcional de salida de voltaje eléctrico minúsculo.
Funciona según el principio del termopar, en el que los metales diferentes se unen en serie o en paralelo para crear uniones 'calientes' y 'frías'. Cuando el flujo radiante infrarrojo de una fuente cae sobre la termopila, crea una diferencia de temperatura a través de estas uniones, desarrollando una cantidad equivalente de electricidad en los terminales finales del termopar.
Esta salida eléctrica proporcional a la fuente de calor se puede medir para identificar el nivel de temperatura de la fuente corporal.
El termopar dentro de un sensor de termopila está incrustado sobre un chip de silicio que hace que el sistema sea extremadamente sensible y preciso.
Uso del sensor de termopila MLX90247
El IC MLX90247 es un excelente ejemplo de un dispositivo sensor de termopila versátil que se puede utilizar idealmente para hacer un dispositivo de escáner térmico o un dispositivo de termómetro sin contacto.

El IC MLX90247 está formado por una red de termopar apilados sobre la superficie de una membrana.
Las uniones receptoras de calor del termopar están ubicadas estratégicamente cerca del centro de la membrana base, mientras que las uniones frías diferenciales se colocan en el borde del dispositivo que forman el área de volumen de silicio de la unidad.
Dado que la membrana está diseñada para ser un mal conductor de calor, el calor detectado de la fuente puede elevarse rápidamente cerca del centro de la menbrane que el borde a granel del dispositivo.
Debido a esto, se puede desarrollar una rápida diferencia de calor a través de los extremos de la unión de la termopila, lo que hace que se desarrolle un potencial eléctrico efectivo a través de estos terminales a través del principio termoeléctrico.
La mejor parte del sensor de termopila es que, a diferencia de los circuitos integrados estándar, no requiere un suministro eléctrico externo para funcionar, sino que genera su propio potencial eléctrico para permitir la medición requerida.
Obtiene dos variantes del IC MLX90247 como se muestra a continuación, en donde una variante proporciona una opción Vss de tierra y la otra sin un pin Vss.

La opción superior permite una medición bipolar de la temperatura IR. Lo que significa que la salida puede mostrar temperaturas más altas que la temperatura ambiente y también más bajas que la temperatura ambiente.
La opción inferior se puede utilizar para medir la temperatura ya sea por encima del nivel ambiental o por debajo del nivel ambiental, y por lo tanto permite una instalación de medición unipolar.
Por qué se usa el termistor en la termopila
En el IC MLX90247 anterior, podemos ver un termistor que se incluye en el paquete del dispositivo. El termistor juega un papel importante en la creación de una salida de nivel de referencia para la etapa de la unidad de medición externa.
El termistor está incorporado para detectar la temperatura ambiente o la temperatura corporal del dispositivo. Este nivel de temperatura ambiente se convierte en el nivel de referencia para la etapa del amplificador operacional de salida.
Siempre que la temperatura de infrarrojos del objetivo sea inferior o igual a este nivel de referencia, la etapa del amplificador del amplificador operacional externo no responde y su salida permanece en 0 V.
Sin embargo, tan pronto como la radiación IR del cuerpo supera la temperatura ambiente, el amplificador operacional comienza a responder para producir una salida mensurable válida que se corresponde linealmente con la salida térmica creciente del cuerpo.
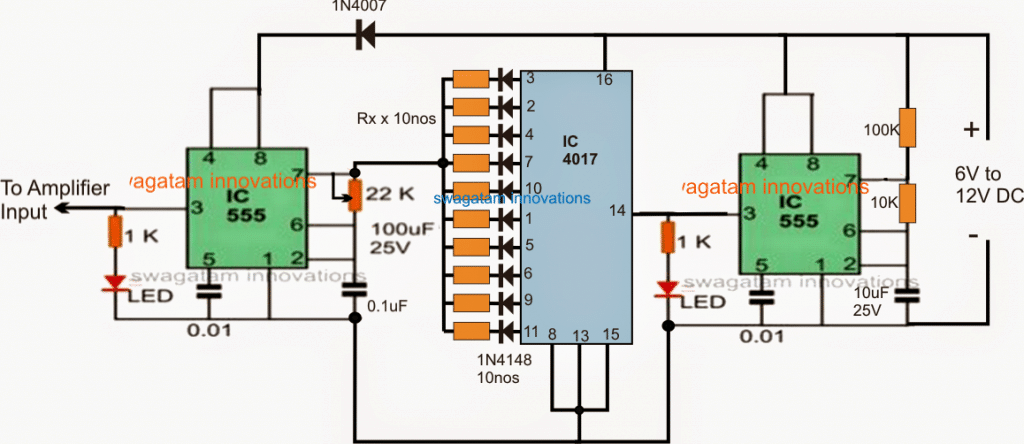
Circuito de termómetro sin contacto con sensor de termopila IC MLX90247

En el circuito prototipo anterior de un circuito de termómetro de infrarrojos sin contacto, encontramos el sensor de termopila IC MLX90247 en modo bipolar, configurado con un amplificador operacional externo diseñado para amplificar una pequeña cantidad de electricidad de la termopila en una salida medible.
El amplificador operacional superior amplifica la salida del termopar del IC MLX90247, mientras que el amplificador operacional inferior amplifica la temperatura ambiente del IC.
Un simple diferencial Medidores VU está conectado a las salidas de los dos amplificadores operacionales. Siempre que no haya un cuerpo emisor de calor frente a la termopila, la temperatura interna del termopar permanece igual a la temperatura del termistor contiguo. Debido a esto, las dos salidas del amplificador operacional generan la misma cantidad de voltajes. El medidor de VU indica así un 0 V en el centro de su dial.
En caso de que un cuerpo humano que tenga una temperatura más alta que la del entorno se encuentre dentro del rango de detección de la termopila, su salida de termopar a través de la patilla 2 y la patilla 4 comienza a aumentar exponencialmente y excede la salida del termistor a través de la patilla 3 y 1.
Esto da como resultado que el amplificador operacional superior genere más voltaje positivo que el amplificador operacional inferior. El medidor de VU responde a esto y su aguja comienza a moverse en el lado derecho de la calibración de 0V. La lectura muestra directamente el nivel de temperatura del objetivo detectado por la termopila.
¿Qué amplificador operacional se adapta a la aplicación?
Dado que se supone que la salida de la termopila es en microvoltios, el amplificador operacional que se utilizará para amplificar este voltaje extremadamente pequeño debe ser altamente sensible y sofisticado, y con una especificación de compensación de entrada muy baja. Para satisfacer las condiciones, un amplificador operacional de instrumentación parece ser la mejor opción para esta aplicación.
Aunque puede encontrar muchos buenos amplificadores de instrumentación en línea, el amplificador de instrumentación INA333 Micro-Power (50μA), Zerø-Drift, Rail-to-Rail Out parece ser el candidato más apropiado.
Hay muchas características excelentes que hacen que este IC sea el más adecuado para amplificar voltajes de termopar en magnitudes mensurables. A continuación se puede ver un circuito amplificador de instrumentación IC INA333 básico, y este diseño se puede utilizar para amplificar el circuito de termopila explicado anteriormente.

En este circuito de amplificador operacional INA333, la resistencia RGRAMO determina la ganancia del circuito y se puede calcular mediante la fórmula:
Ganancia = 1 + 100 / RGRAMO
El resultado de salida estará en kilo ohmios.
Mediante esta fórmula podemos establecer la ganancia global del circuito en función del nivel de microvoltios recibido de la termopila.
La ganancia se puede ajustar desde 0 a 10,000, lo que proporciona al amplificador operacional un nivel excepcional de capacidad de amplificación para entradas de microvoltios.
Para poder utilizar este amplificador de instrumentación sin IC de termopila, necesitaremos dos de estos módulos de amplificador operacional. Uno se utilizará para amplificar la salida de la señal del termopar y el otro se utilizará para amplificar la salida de la señal del termistor, como se muestra a continuación.

La configuración se puede utilizar para fabricar un termómetro IR sin contacto, que producirá una salida analógica que aumenta linealmente en respuesta a un calor IR que aumenta linealmente, según lo detecta la termopila.
La salida analógica se puede conectar a un medidor VU de milivoltios o medidor de mV digital para obtener una interpretación instantánea del nivel de temperatura del cuerpo.
La salida Vo también podría estimarse mediante la siguiente ecuación:
Vo = G ( Ven + - Ven- )
Lista de partes
Se necesitarán las siguientes piezas para construir el circuito de termómetro sin contacto explicado anteriormente:
- Sensor de termopila IC MLX90247 - 1no
- Amplificador operacional de instrumentación INA333 - 2nos
- Voltímetro con rango 0 a 1V FSD - 1no
- Pilas AAA Ni-Cd de 1,2 V para alimentar el INA333 - 2nos
La lectura del voltímetro deberá calibrarse en grados Celsius, lo que se puede hacer con algo de experimentación y prueba y error.
Usando un PIR
A normal Sensor PIR también funciona bien y proporciona una alternativa económica para este tipo de aplicaciones.
Un PIR incluye un sensor basado en material piroeléctrico como TGS, BaTiO3, etc., que pasa por una polarización espontánea cuando detecta un cambio de temperatura dentro de su rango de detección.
La carga de polarización en un dispositivo PIR generada debido a un cambio en su temperatura depende de la potencia de irradiación Fies transmitido por el cuerpo en el sensor PIR. Esto hace que la salida PIR genere una corriente ID ωpAD( Δ T) .
El dispositivo también genera un voltaje Vo que puede ser igual al producto de la corriente ID y la impedancia del dispositivo. Esto se puede expresar con la siguiente ecuación:
Vo= YoDRD/ √1 + ω2R2DC2D
Esta ecuación se puede simplificar aún más en:
Vo= ωpADRD( Δ T) / √1 + ω2R2DC2D
donde p indica el coeficiente piroeléctrico, ω denota la frecuencia en radianes y Δ T es igual a la diferencia en la temperatura del detector TD
y temperatura ambiente Ta.
Ahora, aplicando la ecuación de balance de calor encontramos que el valor de Δ T se puede derivar como se expresa en la siguiente ecuación:
Δ T = RTFies/ √ (1 + ω2τ2T)
Si reemplazamos este valor de Δ T en la ecuación anterior, obtenemos un resultado que representa el Vo con características de paso de banda, como se muestra a continuación:

dónde τES se refiere a la constante de tiempo eléctrica ( RDCD ), τT indica el
constante de tiempo térmica RTCT ), y Fies simboliza el radiante
potencia del objetivo detectado por el sensor.
Las discusiones y ecuaciones anteriores demuestran que el voltaje de salida Vo de un PIR es directamente proporcional a la potencia radiante emitida por la fuente y, por lo tanto, resulta ideal para aplicaciones de medición de temperatura sin contacto.
Sin embargo, sabemos que un PIR no puede responder a una fuente de infrarrojos fija y requiere que la fuente esté en movimiento para permitir una salida legible.
Dado que la velocidad del movimiento también afecta los datos de salida, tenemos que asegurarnos de que la fuente se mueva con una velocidad precisa, un aspecto que puede ser imposible de implementar en un objetivo humano.
Por lo tanto, una manera fácil de contrarrestar esto es dejar que el objetivo humano sea fijo y reproducir su movimiento mediante la interfaz de un picadora de motor con el sistema de lentes PIR.
Prototipo de termómetro sin contacto con PIR
Los siguientes párrafos explican la configuración de prueba de un práctico sistema de escáner térmico, que se puede aplicar para construir un prototipo práctico, después de una completa optimización de los diversos parámetros involucrados.
Como se aprendió en la sección anterior, un PIR está diseñado para detectar emisiones radiantes en forma de tasa de cambio de temperatura. dT / dt , y por lo tanto responde solo a un calor infrarrojo que se pulsa con una frecuencia calculada apropiadamente.
Según los experimentos, se encuentra que el PIR funciona mejor a una frecuencia de pulso de alrededor de 8 Hz, lo que se logra mediante un corte constante de la señal entrante a través de un servo chopper.
Básicamente, el corte de las señales permite que el sensor PIR evalúe y emita la potencia radiante del cuerpo como picos de voltaje. Si la frecuencia del chopper se optimiza correctamente, el valor medio de estos picos será directamente proporcional a la intensidad de la temperatura radiante.
La siguiente imagen muestra una configuración de prueba típica para crear una unidad de medición optimizada o MU.

Para garantizar un funcionamiento eficiente del sistema, la distancia entre la fuente de infrarrojos y el campo de visión del sensor (FOV) debe ser de unos 40 cm. En otras palabras, el cuerpo radiante y la lente PIR deben estar a una distancia de 40 cm entre sí.
También podemos ver un sistema chopper que consiste en un pequeño motor paso a paso con una hélice instalada entre la lente de Fresnel y el sensor piroeléctrico PIR.
Cómo funciona
La radiación IR del cuerpo pasa a través de la lente de Fresnel, luego es cortada a una frecuencia de 8 Hz por el motor del helicóptero y el sensor PIR detecta la radiación IR pulsada resultante.
La CA de salida equivalente a este IR detectado se aplica luego a la etapa de 'acondicionador de señal' hecha con muchas etapas de amplificador operacional.
La salida final amplificada y acondicionada del acondicionador de señal se analiza en un osciloscopio para verificar la respuesta del circuito a una salida radiante variable de un cuerpo.
Optimización del PIR y el Chopper
Para obtener los mejores resultados posibles, se deben garantizar los siguientes criterios para el PIR y la asociación del picador.
El disco cortador o las cuchillas deben colocarse para girar entre la lente de Fresnel y el sensor interno PIR.
El diámetro de la lente de Fresnel no debe ser superior a 10 mm.
La distancia focal de la lente debe ser de unos 20 mm.
Teniendo en cuenta el hecho de que el área de detección típica de AD 1,6 milímetros Fi y se instala cerca de la distancia focal de la lente, el campo de visión o FOV es de 4.58ousando la siguiente fórmula:
FOV(medio ángulo)≈ |tan-1[(Ds/ 2) / f] | = 2,29o
En esta ecuación Ds denota el diámetro detectable del sensor, y F es la distancia focal de la lente.
Especificaciones de la cuchilla picadora
La eficiencia de trabajo del termómetro sin contacto depende en gran medida de cómo se pulsa el infrarrojo incidente a través del sistema de corte y

En este picador se deben emplear las siguientes dimensiones:
El picador debe tener 4 cuchillas y un diámetro Dc debe ser de alrededor de 80 mm. Debe manejarse a través de un motor paso a paso o un circuito controlado por PWM.
La frecuencia de rotación aproximada debe fluctuar entre 5 Hz y 8 Hz para un rendimiento óptimo.
La lente de Fresnel PIR debe colocarse a 16 mm detrás del sensor piroeléctrico, de modo que el diámetro de la señal IR entrante que cae sobre la lente sea de alrededor de 4 mm, y se supone que este diámetro es mucho más pequeño que el TW de 'ancho de diente' del cortador disco.
Conclusión
Un escáner térmico sin contacto o un termómetro IR es un dispositivo muy útil que permite medir la temperatura del cuerpo humano a distancia sin ningún contacto físico.
El corazón de este dispositivo es un sensor de infrarrojos que detecta el nivel de calor en forma de flujo radiante de un cuerpo y lo convierte en un nivel equivalente de potencial eléctrico.
Los dos tipos de sensores que se pueden utilizar para este propósito son el sensor de termopila y el sensor piroeléctrico.
Aunque físicamente ambos parecen similares, hay una gran diferencia en el principio de funcionamiento.
Una termopila funciona con el principio básico de un termopar y genera un potencial eléctrico proporcional a la diferencia de temperatura en sus uniones de termopar.
Un sensor piroeléctrico que se utiliza normalmente en los sensores PIR, funciona detectando el cambio de temperatura de un cuerpo cuando el cuerpo con una temperatura superior a la temperatura ambiente cruza el campo de visión del sensor. Este cambio de nivel de temperatura se convierte en una cantidad proporcional de potencial eléctrico en su salida.
Thermopile es un dispositivo lineal que es mucho más fácil de configurar e implementar en todas las formas de aplicaciones de escaneo térmico.
Referencias:
Amplificador instrumentalSensor de termopila melexis
Termómetro infrarojo
Artículo anterior: Circuito de desinfectante de manos automático - Totalmente sin contacto Siguiente: Circuitos del inyector de señal para la resolución rápida de problemas de todos los equipos de audio