
Los motores ultrasónicos fueron inventados en 1965 por V.V Lavrinko. En general, somos conscientes de que la fuerza motriz viene dada por el campo electromagnético en los motores convencionales. Pero, aquí para proporcionar una fuerza motriz, estos motores utilizan el efecto piezoeléctrico en el ultrasónico rango de frecuencia, que va de 20 kHz a 10 MHz y no es audible para los seres humanos normales. Por lo tanto, se denomina tecnología USM piezoeléctrica. Los USM utilizan la tecnología ultrasónica, que utilizan la energía de vibración ultrasónica de un componente para su funcionamiento.

Motor ultrasónico
Antes de discutir en detalle sobre esta tecnología, necesitamos conocer la información sobre el sensores ultrasónicos , sensores piezoeléctricos y actuadores piezoeléctricos.
Sensor piezoeléctrico

Los cambios en las cantidades físicas como la tensión, la fuerza, la tensión y la aceleración se pueden medir convirtiéndolos en energía eléctrica. Los dispositivos o sensores que se utilizan para este proceso se denominan sensores piezoeléctricos. Y este proceso se denomina como efecto piezoeléctrico . Si se aplica un voltaje a través de un cristal, la presión se ejercerá sobre los átomos del cristal, lo que provocará una deformación de los átomos que es solo del 0,1%.
Sensor ultrasónico

Sensor ultrasónico
Los transductores que generan alta frecuencia (una frecuencia de alrededor de 20 kHz a ondas de sonido de 10 MHz) y atribuyen el objetivo leyendo el intervalo de tiempo entre la recepción del eco y el envío de la señal se denominan sensores ultrasónicos. Por eso, Los sensores ultrasónicos se pueden utilizar para la detección de obstáculos y para evitar colisiones.
Actuador piezoeléctrico

Para el ajuste fino de las lentes de una cámara, espejo, herramientas de mecanizado y otros equipos similares, se requiere un control de movimiento preciso. Este control de movimiento preciso se puede lograr mediante los actuadores piezoeléctricos. La señal eléctrica se puede convertir en un desplazamiento físico controlado con precisión mediante el uso de un actuador piezoeléctrico. Se utilizan para controlar las válvulas hidráulicas y los motores de propósito especial.
Tecnología de motor ultrasónico piezoeléctrico
Simplemente podemos llamar a la tecnología ultrasónica como inversa al efecto piezoeléctrico porque, en este caso, el energía eléctrica se convierte en movimiento. Por lo tanto, podemos llamarlo Tecnología Piezoeléctrica USM.
El material piezoeléctrico denominado titanato de circonato de plomo y cuarzo se utiliza con mucha frecuencia para los USM y también para los actuadores piezoeléctricos, aunque los actuadores piezoeléctricos son diferentes de los USM. Los materiales como el niobato de litio y algunos otros materiales monocristalinos también se utilizan para USM y tecnología piezoeléctrica.
La principal diferencia entre los actuadores piezoeléctricos y los USM se establece como la vibración del estator en contacto con el rotor, que puede amplificarse utilizando la resonancia. La amplitud del movimiento del actuador está entre 20 y 200 nm.
Tipos de motores ultrasónicos
Los USM se clasifican en diferentes tipos en función de diferentes criterios, que son los siguientes:
Clasificación de los USM según el tipo de operación de rotación del motor
- Motores de tipo rotativo
- Motores de tipo lineal
Clasificación de los USM según la forma del vibrador
- Tipo de varilla
- П en forma
- De forma cilíndrica
- Tipo de anillo (cuadrado)
Clasificación basada en el tipo de onda vibratoria
- Tipo de onda estacionaria: se clasifica además en dos tipos:
- Unidireccional
- Bidireccional
- Tipo de onda de propagación o tipo de onda viajera
Trabajo de los motores ultrasónicos

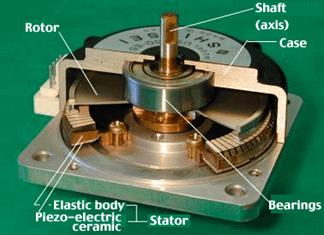
Funcionamiento del motor ultrasónico
La vibración se induce en el estator del motor y se utiliza para transmitir el movimiento al rotor y también para modular las fuerzas de fricción. La amplificación y (micro) deformaciones del material activo se utilizan para generar el movimiento mecánico. El macro movimiento del rotor se puede lograr mediante la rectificación del micro movimiento utilizando la interfaz de fricción entre los estator y el rotor .
los motor ultrasónico consta de estator y rotor. El funcionamiento del USM cambia el rotor o el traductor lineal. El estator del USM consta de cerámica piezoeléctrica para generar vibración, un metal del estator para amplificar la vibración generada y un material de fricción para hacer contacto con el rotor.
Siempre que se aplica voltaje, se genera una onda viajera en la superficie del metal del estator que hace que el rotor gire. Como el rotor está en contacto con el metal del estator, como se mencionó anteriormente, pero solo en cada pico de la onda viajera, lo que provoca el movimiento elíptico, y con este movimiento elíptico, el rotor gira en la dirección inversa a la dirección del ola viajera.
Características y méritos de los motores ultrasónicos
- Estos son de tamaño pequeño y tienen una excelente respuesta.
- Estos tienen una velocidad baja de diez a varios cientos de rpm y un par elevado, por lo que no se requieren engranajes reductores.
- Estos consisten en una alta potencia de sujeción, e incluso si se apaga la energía, no necesitan freno ni embrague.
- Son pequeños, delgados y tienen menos peso en comparación con otros motores electromagnéticos.
- Estos motores no contienen ningún material electromagnético y no generan ondas electromagnéticas. Por lo tanto, estos pueden usarse incluso en áreas de alto campo magnético, ya que no se ven afectados por el campo magnético.
- Estos motores no tienen engranajes y se utiliza una vibración de frecuencia inaudible para impulsar estos motores. Por tanto, no generan ningún ruido y su funcionamiento es muy silencioso.
- Con estos motores es posible un control preciso de la velocidad y la posición.
- La constante de tiempo mecánica para estos motores es inferior a 1 ms y la control de velocidad para estos motores es un paso menos.
- Estos motores tienen una eficiencia muy alta y su eficiencia es insensible a su tamaño.
Deméritos de los motores ultrasónicos
- Se requiere una fuente de alimentación de alta frecuencia.
- Como estos motores funcionan por fricción, la durabilidad es muy inferior.
- Estos motores tienen características de par de velocidad descendente.
Aplicaciones de motores ultrasónicos
- Se utiliza para el enfoque automático de la lente de la cámara.
- Se utiliza en relojes y dispositivos de manipulación de papel compactos.
- Utilizado en el transporte de piezas de máquinas.
- Utilizado para secado y limpieza ultrasónica.
- Se utiliza para inyectar aceite en los quemadores.
- Utilizados como los mejores motores conocidos por ofrecer un alto potencial para la miniaturización de equipos.
- Se utiliza en la exploración de imágenes por resonancia magnética por resonancia magnética en medicina.
- Se utiliza para controlar los cabezales de disco de la computadora como disquetes, disco duro y unidades de CD.
- Utilizado en muchas aplicaciones en los campos de la medicina, aeroespacial y robótica .
- Se utiliza para controlar automáticamente la pantalla rodante.
- En el futuro, estos motores pueden encontrar aplicaciones en campos como la industria del automóvil, nanoposicionamiento, microelectrónica, Tecnología Micro Electro Mechanical System y bienes de consumo.
Este artículo discute sobre los motores ultrasónicos piezoeléctricos, sensores ultrasónicos, sensores piezoeléctricos, actuadores piezoeléctricos, funcionamiento de los USM, méritos, deméritos y aplicaciones de los USM en breve. Para obtener más información sobre los temas anteriores, publique sus consultas comentando a continuación.
Créditos fotográficos:
- Motor ultrasónico por seminarsonly
- Sensor piezoeléctrico por imagesco
- Sensor ultrasónico por iseerobot
- Actuador piezoeléctrico por plataforma robot
- Trabajo de motores ultrasónicos por electrodo




{kind=link}
{kind=link}
{kind=link}
{kind=link}